Устройство фронтального погрузчика | Новости компании ЛОНМАДИ / КВИНТМАДИ
Фронтальные погрузчики относятся к одной из наиболее востребованных разновидностей спецтехники. Популярность этих машин обусловлена их универсальностью и эффективностью. Такая техника применяется для выполнения самых разных работ, включая погрузку сыпучих материалов, укладку трубопроводов, рытье траншей и котлованов, уборку мусора и снега. Мы расскажем о том, как устроен стандартный погрузчик фронтального типа, оборудованный единственным ковшом.
Основные элементы конструкции
Важнейшим механизмом одноковшового фронтального погрузчика является рабочее оборудование, изготовленное из высокопрочной стали. Одна из осей этого узла закреплена на передней части рамы, а другая — на штоках гидравлических цилиндров, служащих для поднимания и опускания ковша. Для управления рабочим инструментом используется один или два гидроцилиндра. Воздействие на ковш осуществляется через рычажный механизм наклона. Различают механизмы двух типов:
- Z-образный.
 Характеризуется увеличенной силой отрыва. Оптимален для машин, используемых для тяжелых работ;
Характеризуется увеличенной силой отрыва. Оптимален для машин, используемых для тяжелых работ; - H-образный. Отличается большим углом запрокидывания ковша.
 Характеризуется увеличенной силой отрыва. Оптимален для машин, используемых для тяжелых работ;
Характеризуется увеличенной силой отрыва. Оптимален для машин, используемых для тяжелых работ;Фронтальные погрузчики могут комплектоваться ковшами различного типа, отличающимися объемом, формой и конструкцией. Для работы с особо твердыми материалами применяется усиленная кромка из стойкой к износу стали.
Стандартная компоновка погрузчика предусматривает заднее расположение двигателя. Дизельный ДВС приводит в движение не только трансмиссию, но и гидравлические насосы, обеспечивающие работу рабочего оборудования, гидроусилителя и других механизмов. Отбор мощности осуществляется специальным редуктором. В современных моделях погрузчиков JCB для управления гидравлическим потоком применяются насосы с переменным потоком, работающие в паре с чувствительным к нагрузке гидрораспределителем.
Конструкция фронтальных погрузчиков отличается высокой надежностью и тщательной защитой основных агрегатов. Кабина машин имеет защиту от опрокидывания и падения груза. Гидравлические магистрали имеют усиленную конструкцию и проложены таким образом, чтобы исключить случайное повреждение при работе.
Гидравлические магистрали имеют усиленную конструкцию и проложены таким образом, чтобы исключить случайное повреждение при работе.
Устройство вилочного погрузчика | Террикон
Устройство вилочного погрузчика
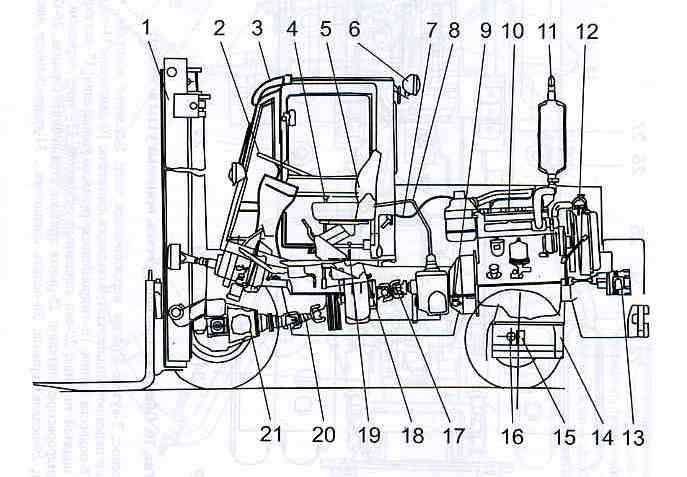
Вилочный погрузчик состоит из большого числа компонентов, включая компоненты гидравлической и электрической системы. Ниже приведены основные структурные элементы складского погрузчика
- Рама погрузчика – это основной конструктивный элемент всей машины, к которому крепятся мачта, мосты, колеса, противовес, защитное ограждение оператора и источник питания. Топливный бак и бак гидравлической системы могут быть частью рамы в сборе.
- Противовес – элемент с большим весом, который крепится к задней части погрузчика. Назначение противовеса погрузчика заключается в уравновешивании поднимаемого груза. У электрических погрузчиков противовесом может выступать свинцово-кислотная аккумуляторная батарея.
- Защитное ограждение оператора – своего рода металлическая «крышка», которая служит для защиты оператора от падающих предметов.
- Источник питания – это может быть двигатель внутреннего сгорания (ДВС), работающий на бензине, на газе или на дизельном топливе. Электропогрузчики оснащены аккумуляторной батареей (АКБ), которая подает питание на электромоторы (постоянного или переменного тока).
- Цилиндры наклона – гидравлические цилиндры, которые крепятся к раме погрузчика и к мачте. Цилиндры служат для наклона мачты вперед и назад при установке груза.
- Мачта – вертикальная конструкция, которая служит для подъема и опускания груза и на которой установлены вилы или иное навесное оборудование. Она состоит из направляющих рельс, которые также обеспечивают поперечную устойчивость. Направляющими этих рельс могут служить ролики или втулки. Мачта приводится в движение одним или двумя цилиндрами непосредственно или при помощи цепей от цилиндров. Мачта погрузчика обычно определяется следующими параметрами: высотой подъема и типом. По типу мачты делятся на симплекс (имеет одну секцию), дуплекс (имеет две секции) и триплекс (имеет три секции и обеспечивает максимальную высоту подъема при минимальной высоте в сложенном состоянии).
- Подъемный механизм погрузчика может быть «стандартным» или «со свободным ходом».
- Каретка – это компонент, на который устанавливаются вилы или иное навесное оборудование. Сама каретка устанавливается на мачту и движется на подшипниках по ее рельсам при помощи цепей или гидравлического цилиндра, к которому каретка может крепиться непосредственно. удалено
- Защитная решетка – это решетка, которая крепится к каретке болтами или приваривается к ней для предотвращения смещения груза назад при подъеме каретки на полную высоту.
- Навесное оборудование – механизм, который крепится к каретке и служит для захвата груза определенной конфигурации. К навесному оборудованию относят механизм бокового смещения, различные захваты, ротаторы, позиционеры вил, мультипаллеты и т.д.
- Шины – суперэластик, пневматические или бандажные шины выбираются в зависимости от условий работы, например, поверхности, по которой погрузчик будет ездить.
 У электрических погрузчиков противовесом может выступать свинцово-кислотная аккумуляторная батарея.
У электрических погрузчиков противовесом может выступать свинцово-кислотная аккумуляторная батарея.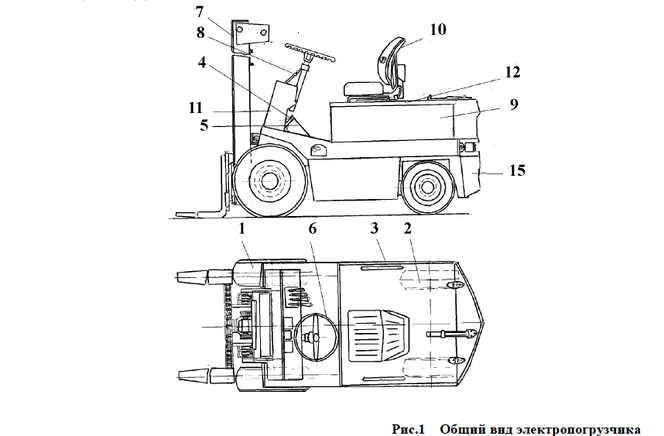

 К навесному оборудованию относят механизм бокового смещения, различные захваты, ротаторы, позиционеры вил, мультипаллеты и т.д.
К навесному оборудованию относят механизм бокового смещения, различные захваты, ротаторы, позиционеры вил, мультипаллеты и т.д.ВИЛОЧНЫЕ ПОГРУЗЧИКИ UNICARRIERS
ДВИГАТЕЛЬ ГАЗ-БЕНЗИН
| ПОГРУЗЧИК UniCarriers PL01A15U | |
| Номинальная грузоподъёмность, кг | 1500 |
| Высота подъёма мачты, мм | 3000 |
| Остаточная грузоподъёмность на высоте 3 метра, при центре тяжести 500 мм, кг | 1400 |
| Двигатель, пр-во Япония | NISSAN / К21 |
| Тип двигателя | Бенз. /газобенз. /газобенз. |
| Объём двигателя, куб. см | 2065 |
| Длина вил, мм | 1070 |
| Длина погрузчика до спинки вил, мм | 2260 |
| Ширина погрузчика, мм | 1065 |
| Клиренс, мм | 135 |
| Высота защитного ограждения, мм | 2115 |
ДИЗЕЛЬНЫЙ ДВИГАТЕЛЬ
| ПОГРУЗЧИК UniCarriers FL01A15U | |
| Номинальная грузоподъёмность, кг | 1500 |
| Высота подъёма мачты, мм | 3000 |
| Остаточная грузоподъёмность на высоте 3 метра, при центре тяжести 500 мм, кг | 1500 |
| Двигатель пр-во Япония | NISSAN 2.5L-4C |
| Объём двигателя, куб. см | 2505 |
| Тип двигателя | Дизель |
| Длина вил, мм | 1070 |
| Длина погрузчика до спинки вил, мм | 2260 |
| Ширина погрузчика, мм | 1065 |
| Клиренс, мм | 135 |
| Высота защитного ограждения, мм | 2115 |
ЧЕТЫРЕХОПОРНЫЕ
| ПОГРУЗЧИК UniCarriers G1N1L20Q | |
| Номинальная грузоподъёмность, кг | 1500 |
| Высота подъёма мачты, мм | 3000 |
| Остаточная грузоподъёмность на высоте 3 метра при центре тяжести 500 мм, кг | 1500 |
| Двигатель движения, (пр-во Япония), кВт | 2х5 |
| Двигатель подъёма, (пр-во Япония), кВт | 11 |
| Тип двигателя | Электро |
| Длина вил, мм | 1070 |
| Длина погрузчика до спинки вил, мм | 2030 |
| Ширина погрузчика, мм | 1120 |
| Клиренс, мм | 110 |
| Высота защитного ограждения, мм | 2120 |
ВИЛОЧНЫЕ ПОГРУЗЧИКИ MANITOU
ДИЗЕЛЬНЫЕ ПОГРУЗЧИКИ, Г/П 4-5т
| Эксплуатационные характеристики | MI-X 40 D |
| Высота подъема | 3. 0 м 0 м |
| Грузоподъемность | 4000 кг |
| Центр тяжести | 500 мм |
| Тяговое усилие | 4000 даН |
| Ходовая скорость | 22 км/ч |
| Наклон мачты (вперед/назад) | ( 6 ° / 12 ° ) |
| Размеры | |
| Длина (до основания грузовых вил) | 3.07 м |
| Общая длина (с грузовыми вилами) | 4.29 м |
| Колесная база | 2 м |
| Ширина | 1.395 м |
| Ширина каретки | 1.25 м |
| Ширина прохода (для поддонов 1000 x 1200) | 4.64 м |
| Ширина прохода (для поддонов 800 x 1200) | 4.77 м |
| Вес (без груза) | 6300 кг |
| Нагрузка на переднюю ось (с грузом) | 9000 кг |
| Нагрузка на переднюю ось (без груза) | 2800 кг |
| Нагрузка на заднюю ось (с грузом) | 1300 кг |
| Нагрузка на заднюю ось (без груза) | 3500 кг |
| Радиус поворота | 2. 78 м 78 м |
| Дорожный просвет | 0.23 м |
| Двигатель / Аккумулятор | |
| Энергоресурс | Дизельный |
| Марка двигателя | Perkins |
| Ступень | 3A |
| Мощность | 56 кВт |
| Количество цилиндров | 4 |
| Общий рабочий объем цилиндров | 4400 см3 |
| Тип трансмиссии | С гидротрансформатором |
| Гидравлическая | |
| Расход (л/мин) | 90 л/мин |
| Давление (бар) | 160 бар |
| Другие характеристики | |
| Стандартные шины | Сплошные эластичные |
| Количество ведущих колес (передний/задний) | 2/0 |
| Количество поворотных колес (передний/задний) | 0/2 |
| Размеры шин (передних колес) | 8. 25-15-14 25-15-14 |
| Размеры шин (задних колес) | 7.00-12 12 |
| Тип стандартной мачты | Двухсекционная |
| Свободный ход (опущенная стандартная мачта) | 0.16 м |
| Высота стандартной мачты (опущенной) | 2.245 м |
| Высота стандартной мачты (поднятой) | 4.17 м |
ГАЗ-БЕНЗИНОВЫЕ ПОГРУЗЧИКИ, Г/П 1,5-3т
| Эксплуатационные характеристики | MI 15 G |
| Высота подъема | 3.3 м |
| Грузоподъемность | 1500 кг |
| Центр тяжести | 500 мм |
| Тяговое усилие | 1460 даН |
| Ходовая скорость | 18 км/ч |
| Наклон мачты (вперед/назад) | ( 6 ° / 12 ° ) |
| Размеры | |
| Длина (до основания грузовых вил) | 2. 24 м 24 м |
| Общая длина (с грузовыми вилами) | 3.31 м |
| Колесная база | 1.42 м |
| Ширина | 1.08 м |
| Ширина каретки | 1 м |
| Ширина прохода (для поддонов 1000 x 1200) | 3.56 м |
| Ширина прохода (для поддонов 800 x 1200) | 3.76 м |
| Высота | 2.15 м |
| Вес (без груза) | 2710 кг |
| Нагрузка на переднюю ось (с грузом) | 3640 кг |
| Нагрузка на переднюю ось (без груза) | 1230 кг |
| Нагрузка на заднюю ось (с грузом) | 570 кг |
| Нагрузка на заднюю ось (без груза) | 1480 кг |
| Радиус поворота | 1.95 м |
| Дорожный просвет | 0.15 м |
| Двигатель / Аккумулятор | |
| Энергоресурс | Газовый |
| Марка двигателя | Nissan |
| Ступень | 3B |
| Мощность | 31. 5 кВт 5 кВт |
| Количество цилиндров | 4 |
| Общий рабочий объем цилиндров | 2065 см3 |
| Тип трансмиссии | С гидротрансформатором |
| Гидравлическая | |
| Расход (л/мин) | 52 л/мин |
| Давление (бар) | 160 бар |
| Другие характеристики | |
| Стандартные шины | Сплошные эластичные |
| Количество ведущих колес (передний/задний) | 2/0 |
| Количество поворотных колес (передний/задний) | 0/2 |
| Размеры шин (передних колес) | 6.50-10 10 |
| Размеры шин (задних колес) | 5.00-8 8 |
| Тип стандартной мачты | Двухсекционная |
| Свободный ход (опущенная стандартная мачта) | 0. 16 м 16 м |
| Высота стандартной мачты (опущенной) | 2.15 м |
| Высота стандартной мачты (поднятой) | 4.26 м |
ЭЛЕКТРОПОГРУЗЧИКИ, 4-х ОПОРНЫЕ
| Эксплуатационные характеристики | ME 418 |
| Высота подъема | 3.3 м |
| Грузоподъемность | 1800 кг |
| Центр тяжести | 500 мм |
| Тяговое усилие | 1200 даН |
| Ходовая скорость | 13.5 км/ч |
| Наклон мачты (вперед/назад) | ( 5 ° / 10 ° ) |
| Размеры | |
| Длина (до основания грузовых вил) | 2.1 м |
| Общая длина (с грузовыми вилами) | 3.25 м |
| Колесная база | 1.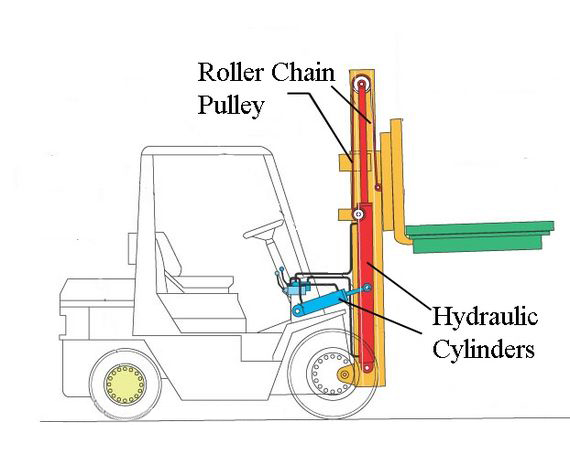 38 м 38 м |
| Ширина | 1.14 м |
| Ширина каретки | 1 м |
| Ширина прохода (для поддонов 1000 x 1200) | 3.51 м |
| Ширина прохода (для поддонов 800 x 1200) | 3.71 м |
| Высота | 3.57 м |
| Вес (без груза) | 3070 кг |
| Нагрузка на переднюю ось (с грузом) | 4350 кг |
| Нагрузка на переднюю ось (без груза) | 1400 кг |
| Нагрузка на заднюю ось (с грузом) | 520 кг |
| Нагрузка на заднюю ось (без груза) | 1670 кг |
| Радиус поворота | 1.9 м |
| Дорожный просвет | 0.11 м |
| Двигатель / Аккумулятор | |
| Энергоресурс | Электрический |
| Напряжение | 48 Вольт |
| Сила тока | 465 Ач |
| Гидравлическая | |
| Расход (л/мин) | 35 л/мин |
| Другие характеристики | |
| Стандартные шины | Сплошные эластичные |
| Количество ведущих колес (передний/задний) | 2/0 |
| Количество поворотных колес (передний/задний) | 0/2 |
| Размеры шин (передних колес) | 21X8-9 |
| Размеры шин (задних колес) | 5. 00-8 00-8 |
| Тип стандартной мачты | Двухсекционная |
| Свободный ход (опущенная стандартная мачта) | 0.145 м |
| Высота стандартной мачты (опущенной) | 1.98 м |
| Высота стандартной мачты (поднятой) | 3.57 м |
ВИЛОЧНЫЕ ПОГРУЗЧИКИ ZOOMLION
ДВИГАТЕЛЬ ГАЗ-БЕНЗИН
ВИЛОЧНЫЙ ПОГРУЗЧИК ZOOMLION FG30
| Номинальная грузоподъёмность, кг | 3000 |
| Высота подъёма мачты, мм | 3000 |
| Остаточная грузоподъёмность на высоте 3 метра, при центре тяжести 500 мм, кг | 3000 |
| Двигатель, пр-во Япония | Nissan K25 |
| Тип двигателя | Газ/бензин |
| Мощность двигателя, кВт | 37,4 при 2300 об/мин. |
| Длина с вилами, мм | 3780 |
| Ширина погрузчика, мм | 1230 |
| Клиренс, мм | 120 |
| Высота защитного ограждения, мм | 2170 |
ДИЗЕЛЬНЫЙ ДВИГАТЕЛЬ
ВИЛОЧНЫЙ ПОГРУЗЧИК ZOOMLION FD80-W4
| Номинальная грузоподъёмность, кг | 8000 |
| Высота подъёма мачты, мм | 3000 |
| Остаточная грузоподъёмность на высоте 3 метра при центре тяжести 600 мм, кг | 8000 |
| Двигатель, пр-во Япония | Isuzu 6BG1 |
| Тип двигателя | Дизельный |
| Мощность двигателя, кВт | 82.4 при 2000 об/мин. |
| Длина без вил | 5020 |
| Длина вил | 1220 |
| Ширина погрузчика, мм | 2024 |
| Клиренс, мм | 235 |
| Высота защитного ограждения, мм | 2510 |
ЭЛЕКТРОПОГРУЗЧИКИ
ВИЛОЧНЫЙ ЭЛЕКТРОПОГРУЗЧИК ZOOMLION FB15
| Номинальная грузоподъёмность, кг | 1500 |
| опор | 4 |
| Высота подъёма мачты, мм | 3000 |
| Остаточная грузоподъёмность на высоте 3 метра при центре тяжести 500 мм, кг | 1500 |
| Двигатель движения, Кв | 8 |
| Двигатель подъёма, Кв | 10 |
| Тип двигателя | Электро |
| Длина без вил, мм | 1990 |
| Ширина погрузчика, мм | 1070 |
| Клиренс, мм | 100 |
| Высота защитного ограждения, мм | 2100 |
Устройство погрузчика — ТФН
Вилочные погрузчики широко используются на складах, предприятиях, доках и других объектах. Без этих самоходных машин сегодня невозможно представить погрузочно-разгрузочные работы, перемещение и складирование грузов.
Без этих самоходных машин сегодня невозможно представить погрузочно-разгрузочные работы, перемещение и складирование грузов.
Погрузчики представляют собой слаженный механизм – предмет настоящей инженерной гордости. Детали и составляющие части обеспечивают устройству превосходные эксплуатационные характеристики. Высокая грузоподъемность, многофункциональность, маневренность, простота управления и долговечность – все это делает автопогрузчики незаменимыми помощниками.
Общая конструкция
Основной инструмент погрузчика – вилы, с помощью которых осуществляется захват, спуск/подъем и перемещение различных грузов. Их длина варьируется от 60 до 100 сантиметров. Движение вил обеспечивает грузоподъемник (мачта) и каретка, которые функционируют благодаря нескольким гидроцилиндрам, трансформирующих энергию (топливо) в рабочую силу. Кузов автопогрузчика включает в себя металлическое основание, двигатель, коробку передач, сцепление, тормоза, дифференциал, мосты и другие небольшие механизмы.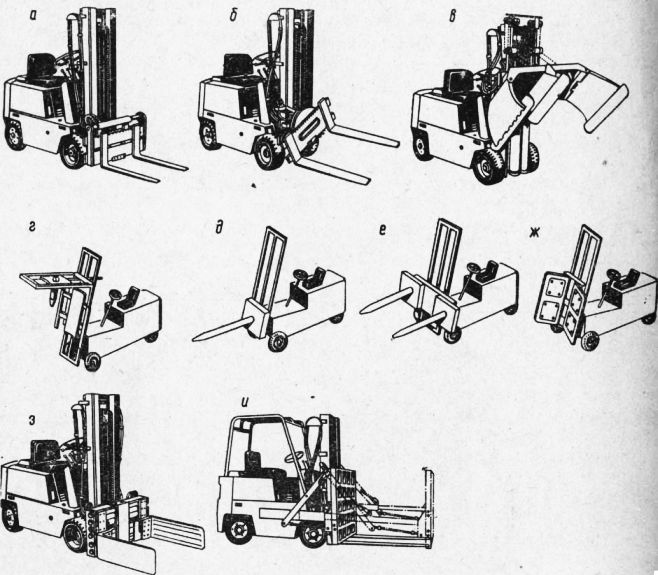
Согласно мировым стандартам, все погрузчики обязательно тестируются на предмет фронтальной и боковой устойчивости. Чтобы гарантировать безопасность, производители дополнительно оснащают конструкцию жестким сварным шасси. Центр тяжести должен быть расположен выше колесной базы, поэтому двигатель, коробку передач и дифференциал стараются устанавливать как можно ниже.
Рассмотрим особенности устройства различных моделей вилочных погрузчиков на примере основных деталей.
Двигатель
Складскую технику оснащают бензиновыми, дизельными, газовыми или электрическими двигателями. ДВС более шумные, а для безопасности оператора и остальных работников воздух внутри помещения должен хорошо проветриваться. Как правило, такие машины используют для наружных работ.
Электропогрузчики – экологически безопасные, экономичные и бесшумные машины. Единственный их недостаток – необходимость постоянной подзарядки аккумуляторных батарей.
Мощность двигателей варьируется от скромных 20 л. с. (15 кВт) для небольших мини-погрузчиков и 150-200 л.с. (110-147 кВт) для «тяжелых» гигантов с высокой грузоподъемностью.
с. (15 кВт) для небольших мини-погрузчиков и 150-200 л.с. (110-147 кВт) для «тяжелых» гигантов с высокой грузоподъемностью.
Грузоподъемник
Важнейшая часть конструкции устройства, отвечающая за перемещение и поднятие вил с грузом. Первые автопогрузчики были лишены гидравлики и оборудовались неподвижной вертикальной мачтой и кареткой. Вся эта «система» управлялась работником с помощью лебедки и стальных тросов.
Современные погрузчики оснащены несколькими гидроцилиндрами и многосекционными выдвижными мачтами со стандартным или свободным ходом вил и с возможностью регулировать угол наклона. Максимальная грузоподъемность у некоторых моделей достигает 8 метров (стандартная около 3 – 3,5 метров), при этом производители устанавливают специальные механизмы для защиты от вибраций или неровностей пола, что помогает обеспечить безопасность подъемных работ.
Трансмиссия
Большинство автопогрузчиков оборудованы гидромеханической трансмиссией. «Механика» нужна для ведущего моста и насосов, а гидравлическая передача обеспечивает рулевое управление и отвечает за движение грузоподъемника.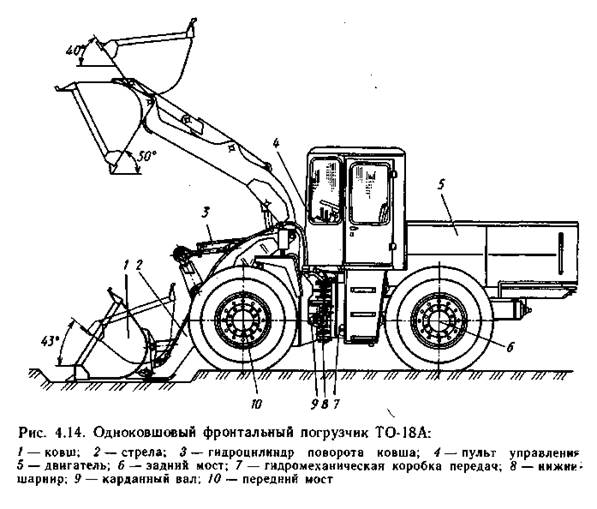
У техники с высокой грузоподъемностью колесные тормоза приводятся в действие пневматической передачей, функционирующей посредством энергии сжатого воздуха.
Не менее популярна автоматическая коробка передач. Такой вариант предпочтителен для небольших устройств, которые выполняют большое количество маневров в стесненных условиях.
Шины
Вилочные погрузчики работают в различных условиях. Оборудование может ездить по гладкому полу, неровной поверхности с небольшими дефектами или строительной площадке с изрытым грунтом. В зависимости от перечисленных факторов, автопогрузчик комплектуется разными шинами:
- Бандажные. Состоят из плотной резины, тонкого амортизирующего слоя и стального внутреннего кольца. Автопогрузчики с такой «обувью» используются преимущественно на складах, в условиях ровной поверхности.
- Пневматические. По строению напоминают обычную автомобильную покрышку, только меньше и содержит дополнительные слои корда. Благодаря этому колеса отлично «гасят» все ямки и неровности, продлевая жизнь трансмиссии. Подходят для различных видов покрытий: от ровного пола до грунта и снега.
- Суперэластик. Комбинация двух предыдущих типов. Шины состоят из трех слоев: внутренний фиксирует резину на металлическом ободе, средний необходим для амортизации. Внешний производится в двух вариациях: с рисунком (можно использовать устройство в сложных условиях) и без (желательно ограничиться складским полом).
 Подходят для различных видов покрытий: от ровного пола до грунта и снега.
Подходят для различных видов покрытий: от ровного пола до грунта и снега.Тормозная система
Стандартная комплектация большинства моделей автопогрузчиков включает в себя сервотормоз. Устройства с высокой грузоподъемностью оборудуются дисковыми тормозами с масляными ваннами. Детали и механизмы такой системы изнашиваются медленно, что уменьшает расходы на обслуживание.
Кабина управления
Необходимость наличия отдельной кабины для оператора была осознана далеко не сразу. Только после нескольких несчастных случаев, связанных с травмами при падении грузов, производители начали разрабатывать специальные каркасные конструкции, обеспечивающие защиту и удобство работы оператора.
Современные вилочные погрузчики оборудованы комфортной кабиной, оснащенной шумоизоляцией и системой безопасности. Специальная предохранительная решетка защищает от опасности падения груза. Кресло с ремнем безопасности позволит предотвратить серьезные последствия для оператора в случае столкновения или переворачивания автопогрузчика.
Кабина может быть открытой и закрытой. Различие в том, что первые оборудуются крышей со стальной решеткой и применяются преимущественно внутри складов. Закрытие могут использоваться снаружи даже в зимнее время (в большинстве моделей предусмотрен обогрев).
В некоторых погрузчиках кабины оборудуются компьютерной системой управления, что требует от «водителя» навыков работы со сложной техникой.
Навесное оборудование
Навесное оборудование представляет собой совокупность дополнительных приспособлений для погрузчика, расширяющие сферу его применения. Купить их намного дешевле, чем приобретать для узкоспециализированных задач отдельный вид техники. Перечислим наиболее распространенные варианты:
Перечислим наиболее распространенные варианты:
- Вилочные захваты. Предназначены для работы с «непаллетизированными» грузами, то есть теми, которые сложно перемещать с помощью паллетов. Например, рулоны или бочки.
- Устройство бокового смещения (сайдшифтер). Позволяет свести маневры к минимуму при движении с грузами. Актуально в случае работы погрузчика в ограниченном пространстве.
- Ковши. Используются для транспортировки и поднятия сыпучих материалов.
- Отвалы. Необходимы для очищения территории или дорожного покрытия от снега.
- Дорожные щетки. Эффективное средство для уборки улиц, помещений.
- Бурильное оборудование. Обычный вилочный погрузчик можно превратить в машину, способную пробурить небольшую скважину, например, под установку столба освещения снаружи склада.
Итоги
Технические характеристики вилочного погрузчика зависят от специфики устройства приведенных выше составных частей. Имея представление об основных элементах, механизмах и особенностях строения погрузочной техники, вы сможете приобрести оборудование, максимально отвечающее поставленным задачам.
Имея представление об основных элементах, механизмах и особенностях строения погрузочной техники, вы сможете приобрести оборудование, максимально отвечающее поставленным задачам.
Погрузчик: технические характеристики погрузчиков, виды
Погрузчик – машина самоходного типа, предназначенная для поднятия, транспортировки и укладки различных грузов. Это могут быть сыпучие материалы, грунт и горные породы, зерно, снег и мелкоштучные объекты. Погрузчики широко используются в организации склада, сельском хозяйстве, на коммунальных предприятиях, строительных площадках.
Виды погрузчиков
Основное различие между погрузчиками заключается в принципе их работы. В зависимости от этого различают машины таких типов действия:
- периодического – вилочные (бензиновые и электрические), ковшовые, платформенные, манипуляторы и копновозы;
- непрерывного – ленточные, скребковые, роторные и шнековые.
Вилочный агрегат. Используется в складских условиях для поднятия, перемещения, разгрузки, погрузки и штабелирования грузов в виде палет и поддонов. Все работы выполняются автопогрузчиком посредством приведения в действие навесного оборудования: устройства бокового смещения, вилочного захвата, позиционера, захвата для бочек и рулонов.
Ковшовый. Разновидность спецтехники, в которой рабочим органом выступает ковш. Его подъем, наполнение и поворот осуществляются при движении машины. Ковшовую технику используют для погрузки и разгрузки грунта и сыпучих материалов на строительных площадках, для уборки снежных завалов.
Платформенный. Разновидность складского оборудования для подъема, перемещения и опускания грузов. Последние размещаются на специальной платформе.
Погрузчик-манипулятор. Машина, которая используется для изменения пространственного положения грузов. Рабочим органом выступает крановая стрела, которая занимается перемещением объектов в процессе ремонтно-восстановительных и монтажно-демонтажных работ.
Погрузчик-копновоз. Машина, оснащенная специальным приспособлением для захвата и перемещения уплотненных куч сена или соломы. Используется в местах их заготовки и просушки.
Ленточный. Транспортирующее устройство непрерывного действия. Используется для перемещения сыпучих и штучных грузов.
Скребковый. Самоходная техника с рабочим органом в виде нагребающих лап с дисками. Она подтягивает к себе груз (сыпучий материал, снег), передает его в заднюю часть машины и сбрасывает в специальную емкость.
Роторный. Спецтехника для выполнения погрузочно-разгрузочных работ, используется для сыпучих и мелкоштучных грузов. Незаменима в ходе уборки снега. При этом рабочим органом является роторное колесо.
Шнековый. Разновидность спецтехники, оснащенной вращающимся валом. Погрузка-разгрузка сыпучих материалов начинается после начала его движения. При этом забор грузов идет небольшими порциями, но непрерывно.
Также погрузчики классифицируют следующим образом:
- по способу передвижения – колесные и гусеничные;
- по назначению – для сыпучих материалов и штучных грузов;
- по типу рабочего органа – одно-, многоковшовые и вилочные.
- по способу разгрузки – боковые, фронтальные.
Характеристики погрузчиков
Погрузчики – многофункциональные машины, которые различаются по конструкции и принципу действия. Однако большинство из них объединяет ряд общих характеристик:
- грузоподъемность техники,
- тип и полезный объем ковша,
- максимальная высота выгрузки,
- нормальный и специальный свободный ход,
- производительность,
- наличие дополнительного навесного оборудования,
- габариты и масса.
Погрузчики Cat®
Среди многофункциональной техники погрузчики занимают особо место в ассортименте компании Caterpillar. Ее модели, которые производятся и поставляются в Россию под всемирно известным брендом Cat®, демонстрируют свою производительность в самых разных условиях работы. Среди них есть колесные и гусеничные модели, стандартных и компактных размеров, а также экскаваторы-погрузчики. Большую роль играет оснащение навесным оборудованием: благодаря ему погрузчики становятся еще более универсальными в применении. Задача оператора упрощается тем, что заменить устройства можно в течение 30 секунд.
Ее модели, которые производятся и поставляются в Россию под всемирно известным брендом Cat®, демонстрируют свою производительность в самых разных условиях работы. Среди них есть колесные и гусеничные модели, стандартных и компактных размеров, а также экскаваторы-погрузчики. Большую роль играет оснащение навесным оборудованием: благодаря ему погрузчики становятся еще более универсальными в применении. Задача оператора упрощается тем, что заменить устройства можно в течение 30 секунд.
Погрузчики Cat® от Caterpillar отличаются высокой производительностью, простотой загрузки ковша, интуитивно понятными органами управления и эргономичной кабиной. Убедитесь в этом сами, выбрав подходящую модель из нашего каталога. За дополнительной информацией, касающейся приобретения или сервисного обслуживания погрузчиков, обращайтесь к нашим специалистам по контактным номерам.
Устройство фронтального погрузчика
Погрузчик одноковшового типа состоит из базовой машины и рабочего оборудования шарнирно-сочлененного типа. К сменному рабочему оборудованию относят разные типы ковшей, захватов, предназначенных для работы со штучными грузами, бульдозерных отвалов и т.д.
К сменному рабочему оборудованию относят разные типы ковшей, захватов, предназначенных для работы со штучными грузами, бульдозерных отвалов и т.д.
Внимание! Стрела и ковш управляются из кабины при помощи джойстика или рычагов (в зависимости от модификации погрузчика).
Основной рабочий орган погрузчика – ковш. Например, XCMG ZL30G оснащается ковшом, имеющим объем 1,8 метров кубических. Специальные зубья, которыми оснащен ковш, позволяют не только перемещать грузы, но и вести землеройные работы. Рабочий орган шарнирно закрепляется на внешнем конце подъемной стрелы, и рычажной системой соединяется с двумя гидравлическими цилиндрами.
Внимание! Что касается вспомогательного рабочего оборудования, то на погрузчик устанавливают вилочные подхваты, крановые безблочные стрелы, челюстные захваты, а также ковши иных типов и вместительности.
Читайте также: Разновидности ковшей, навесное оборудование для фронтальных погрузчиков
Что касается эксплуатационных параметров одноковшовых фронтальных погрузчиков, то к ним относят:
- Объем ковша: от этого параметра зависит количество материала, грузов, которые можно переместить за один цикл работы строительной техники.
- Габариты: машины XCMG отличаются маневренностью и мобильностью, так как могут работать в условиях ограниченного пространства.
- Возможность установки навесного оборудования: использование вил, боковых насадок, крюков, делает фронтальный погрузчик техникой, универсальной в использовании.

Внимание! К конструктивным особенностям XCMG относят Z-образную схему конструкции, что обеспечивает оптимальное функционирование всего механизма в целом. Это способ получения максимального усилия при минимальном расходе энергии. Операция выполняется за счет функционирования гидравлического цилиндра, и не включает в работу другое оборудование погрузчика, благодаря чему значительно снижается вероятность износа узлов и агрегатов, а также происходит уменьшение рабочих затрат.
Что касается иных конструктивных подробностей, то за перемещение автопогрузчика отвечает атмосферный силовой агрегат, разработанный по специальной немецкой технологии, он имеет мощность 92 кВт или 125 лошадиных сил, обеспечивает вращение вала со скоростью 2200 оборотов в минуту, имеет рабочий объем 6,8 литра. Производительный двигатель отличается высоким качеством, имеет солидный эксплуатационный срок. Машины также оснащаются турбированным мотором, имеющим практически аналогичные с первым характеристики.
Производительный двигатель отличается высоким качеством, имеет солидный эксплуатационный срок. Машины также оснащаются турбированным мотором, имеющим практически аналогичные с первым характеристики.
Шестицилиндровый мотор оснащен жидкостной системой охлаждения, в качестве горючего используется дизельное топливо. Топливная емкость автопогрузчика имеет объем 150 литров, что обеспечивает возможность долгой интенсивной эксплуатации техники.
Устройство XCMG ZL30G имеет много общего с конструкцией LW300F, отличительной чертой является его несущая рама. Она характеризуется более современным внешним видом и обладает повышенной прочностью.
При конструировании погрузчика учитывались требования потребителей, инновационные технические решения и повышение норм качества деталей и сборки. Основные комплектующие техники – мотор, гидромеханическая КПП, мосты ZF, а также зигзагообразная кинематика рукояти.
Что касается особенностей функционирования узлов и агрегатов ходовой части погрузчика, то максимальный уклон, по которому способна подняться техника составляет 28 градусов. Пневматический ход представлен колесами, оснащенными шинами низкого давления, благодаря чему погрузчик способен перемещаться по пересеченной местности и неровному основанию.
Пневматический ход представлен колесами, оснащенными шинами низкого давления, благодаря чему погрузчик способен перемещаться по пересеченной местности и неровному основанию.
Машина оснащается трансмиссией PowerShift, гарантирующей бесступенчатое переключение передач под нагрузкой. КПП обеспечивает возможность движения на 2 задних и 4 передних скоростях.
Автопогрузчик оснащен парой ведущих мостов от компании Meritor, исключающих пробуксовывание, и повышающих проходимость. К иным особенностям техники относят оснащение погрузчика передним жестким мостом, и задним качающимся вместе с рамой. Колесная формула специализированной техники: 4 на 4.
При покупке XCMG ZL30G, клиенту доступны две модификации автопогрузчика с разными системами управления:
- джойстиковой;
- рычажной, в состав которой входит две рукояти.
Обе системы позволяют максимально комфортно управлять погрузчиком, а переключение скоростей производится посредством механизма на рулевой колонке.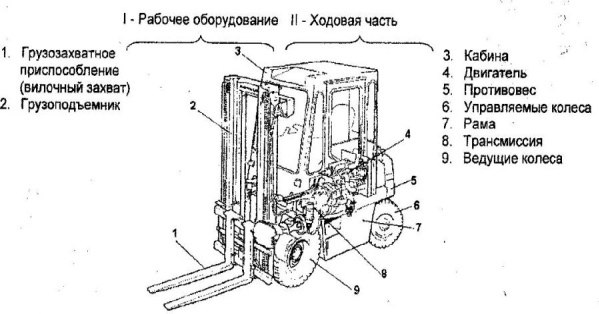
Читайте также: Джойстики или рычаг – какое управление выбрать?
Цена погрузчика XCMG ZL30G существенно зависит от навесного оборудования, которое поставляется в комплекте с машиной. Изначально предусмотрена установка ковша вместительностью 1,8 кубометра, оснащенного специальными зубьями.
Дополнительно могут устанавливаться органы другого назначения и объема, что повышает универсальность спецтехники. Например, ковш с боковой выгрузкой, вилы, бульдозерный или снежный отвал, челюстной захват. Система для быстрой замены рабочего оборудования позволяет сократить время простоев.
Грузоподъёмник погрузчика — виды, принцип работы, назначение
Грузоподъёмность погрузчика вещь интуитивно понятная каждому. Если нужно поднимать груз массой 1 100 кг, то естественно нужен погрузчик равной или большей грузоподъёмности.У вилочных погрузчиков — это погрузчик грузоподъёмностью 1,5 т, так называемый «полуторотонник», самый распространенный в России.
 Но всё равно есть нюансы, о которых мы поговорим в другой статье.
Но всё равно есть нюансы, о которых мы поговорим в другой статье. А вот какую выбрать мачту (грузоподъёмник, стрелу) у погрузчика, чтобы она удовлетворяла вашим потребностям по высоте подъёма груза, тут нужно быть подкованным в этом вопросе и не промахнуться с выбором иначе вы просто не сможете использовать своё вилочное приобретение.
Типы грузоподъёмников вилочных погрузчиков
Мачты у погрузчиков бывают:- Duplex — двухсекционная мачта со стандартным свободным ходом.
- Duplex — двухсекционная мачта со специальным свободным ходом.
- Triplex — трёхсекционная мачта.
- Quadroplex — четырёхсекционная мачта (в данной статье подробно не рассматривается).
У разных производителей погрузчиков типы мачт в спецификациях обозначаются по-разному, но сути это не меняет. На наш взгляд, лучше всего маркировка мачт реализована у японских погрузчиков Nissan: 2W, 2F, 3F. Где цифра обозначает количество секций а буква F – наличие специального свободного хода у грузоподъемника.
 Так же принято обозначать эти мачты буквами FV, FFV, TFV.
Так же принято обозначать эти мачты буквами FV, FFV, TFV.Мачта duplex со стандартным свободным ходом
Данный тип мачты имеет две секции и два цилиндра подъёма расположенных по бокам. У такой мачты вилы поднимаются на высоту 150 мм от земли, а дальше начинает выдвигаться внутренняя секция мачты, увеличивая тем самым высоту погрузчика.Высоты подъёма таких мачт составляют от 3,0 м до 5,0 м. Стандартная высота подъёма у погрузчиков считается 3,0 м, потому что в сложенном состоянии мачта высотой 2 000 мм от пола, что ниже или равно высоте самого погрузчика и делать её меньше нет смысла. Максимум 5,0 м – потому что в сложенном состоянии мачта уже высотой 3 100 мм и трудно проходит в ворота складов.
Официальные дилеры заводов-изготовителей погрузчиков завозят и держат на складе погрузчики со стандартными мачтами 3,0 м, так как на них высокий спрос. Стоимость погрузчиков с такими мачтами ниже, чем со специальными грузоподъёмниками.
Кинематическая схема стандартной мачты дуплекс выглядит следующим образом.
При нажатии на рычаг подъёма у погрузчика начинают выдвигаться гидравлические цилиндры вверх и поднимают внутреннюю секцию мачты на которой расположены блоки (система полиспаст) с цепями прикреплёнными к каретке. Благодаря этому грузовая каретка с вилами тоже начинает подниматься вверх. Из курса теоретической механики известно, что блок движется со скоростью в 2 раза медленнее, чем груз который мы хотим поднять. Таким образом можно высчитать высоту мачты в поднятом положении при нужной высоте поднятия вил.
Мачта duplex со специальным свободным ходом
Мачта состоит из двух секций, как и стандартная, но в гидравлическую схему добавляется ещё один цилиндр специального свободного хода, который расположен посредине мачты. Его функция поднять каретку с вилами без изменения строительной высоты грузоподъёмника, и лишь потом выдвигается внутренняя секция мачты с помощью двух боковых цилиндров подъёма. Самые распространенные высоты подъёма у этих грузоподъемников варьируется от 3,0 м до 3,3 м.
У мачты дуплекс «фри лифт» с высотой подъёма 3,0 м величина свободного хода вил с решёткой ограждения груза на грузовой каретке составляет 1 100 мм вместо 150 мм у стандартной мачты дуплекс, а без неё – 1 450 мм. Специалисты в грузоподъёмной технике это отлично знают и всегда при покупке погрузчика учитывают.
Данная функция просто необходима, если вам нужно брать груз со второго яруса штабеля или стеллажей, а поднять вилы на такую высоту не представляется возможным так как поднятая мачта уже упирается в потолок. Самым распространенным случаем использования мачты «фри лифт» является работа погрузчика в железнодорожном вагоне при его разгрузке и загрузке, когда нужно не только заехать в вагон у которого проём равен 2 300 мм, но и поднять вилы на высоту выше одного метра, чтобы взять верхний ярус паллет. Именно поэтому такую мачту называют «мачта вагонного типа» или «мачта вагонный вариант». Кинематическая схема этого грузоподъёмника выглядит следующим образом.
Сначала поднимается центральный цилиндр с блоком и с ним вилы. Затем начинают работать основные цилиндры подъёма и выдвигают внутреннюю секцию мачты.
Затем начинают работать основные цилиндры подъёма и выдвигают внутреннюю секцию мачты.
Заметьте, этот грузоподъёмник называют «вагонный вариант» а не «фурный вариант». Всё просто и очевидно. В еврофуре паллет на паллет редко когда грузятся, так как еврофура грузоподъёмностью 20 т., а по площади вмещается всего 33 поддона с грузом (паллет). Получается, что если груз стоит друг на друге и весит он 1 000 кг, то в фуре должно уместится 66 таких паллет и масса будет 66 т., но грузоподъёмность же фуры 20 т. И наоборот, если груз легкий, то его обычно делают высоким чтобы было удобно обрабатывать и делать меньше операций при загрузке-разгрузке.
А вот у железнодорожного вагона грузоподъемность составляет 68 т. и там возможно грузить паллеты друг на друга, так как его грузоподъёмность позволяет.
Болгарская чудо-мачта duplex
Инженеры Балканкар решили перевернуть мировые устои изготовления грузоподъёмников и изготовили мачту дуплекс со свободным ходом вил с помощью только одного телескопического центрального цилиндра подъёма.
Мачта в три сложения Triplex
В отличии от предшественников мачта обладает уже тремя секциями. У автопогрузчиков и электропогрузчиков эти мачты всегда имеют специальный свободный ход по умолчанию.Преимущество таких стрел состоит не только в том, что у них есть свободный ход вил как у мачты дуплекс со свободным ходом, но и в том что их строительная высота позволяет въезжать в вагон или еврофуру и в то же время грузить паллеты на высоту выше 4,5 м, вплоть до 5,5 м. Линейка же таких грузоподъёмников составляет от 3,3 м до 7,0 м у погрузчиков и до 13,5 м у рич-траков. Такие грузоподъёмники увеличивают ёмкость вашего склада по сравнению с обычными мачтами на 30% или даже 50%, так как становится возможным поднять груз выше ещё на один-два яруса на стеллажах.
Мачта триплекс по кинематической схеме совмещает в себе первые две мачты.
Сначала работает цилиндр свободного хода, затем основные цилиндры подъёма которые поднимают вторую секцию мачты а та уже через систему блоков тянет вверх третью секцию мачты с кареткой и вилами.![]() Эта мачта более универсальная и именно поэтому поставщики погрузчиков стараются держать на складе технику с этими грузоподъёмниками.
Эта мачта более универсальная и именно поэтому поставщики погрузчиков стараются держать на складе технику с этими грузоподъёмниками.
Примечание:
У самоходных электрических штабелёров применяются мачты триплекс в три сложения как без свободного хода так и с ним. Уточняйте у дилеров при покупке.
Частный случай мачты триплекс с двумя цилиндрами свободного подъёма вил. Такие мачты в основном используются на погрузчиках большой грузоподъемности от 11,0 до 45,0 т., так как между секциями мачтами есть больше расстояния и можно установить не один а два цилиндра свободного хода чтобы оператор мог лучше видеть груз при его обработке.
Четырёхсекционная маста Quadroplex
Это результат гения инженеров грузоподъёмных механизмов на погрузчиках. Мачта уже состоит из четырёх секций. Диапазон высот подъёма составляет 6,0 м — 8,0 м. Используется весьма редко у некоторых производителей на погрузчиках грузоподъемностью от 2,0 до 3,5 т. К ним относятся GROS и HYUNDAI.
Односекционная мачта simplex
Мачта симплекс имеет только одну секцию, поэтому у неё нет боковых цилиндров подъёма а есть только центральный цилиндр, который является одновременно цилиндром свободного хода и основным цилиндром подъёма. Явными представителями и обладателями таких мачт являются гидравлические штабелёры с высотой подъёма 1,6 м.Замена мачты
Практика показывает, что клиенты при покупке погрузчика пытаются сэкономить и покупают автопогрузчики и электропогрузчики с мачтой стандарт, так как это дешевле. Потом переезжают на другой склад, где стеллажи уже выше на один ярус. И что делать? Покупать новый погрузчик? Но существующий устраивает, кроме высоты подъёма. Менять мачту? Но кто поможет?«Склад.ру» вникает в ваши проблемы и поможет по мере возможностей, предложив замену мачты или замену погрузчика со справедливой доплатой.
Вилочные погрузчики: устройство, эксплуатация: учебное пособие
Описание товара
Книга является профессиональным учебным пособием по вилочным погрузчикам с приводом от ДВС и с электроприводом. Профессиональный учебный курс подготовлен автором книги по заказу Мосгортранса.
Профессиональный учебный курс подготовлен автором книги по заказу Мосгортранса.
В книге с применением современной профессиональной иностранной и отечествен-ной технической документации профессионально, подробно и доступно (с применением дидактических методик) описано устройство вилочных погрузчиков с приводом от ДВС и с электроприводом, а также их эксплуатация и техническое обслуживание.
Проект издания выполнен на благо народа Российской Федерации и без использования средств госбюджета.
Предназначена книга в качестве учебного пособия для студентов, обучающихся по программам высшего профессионального образования (уровней подготовки: бакалавр, магистр, специалист) по профильным направлениям подготовки, для студентов профильных направлений подготовки образовательных учреждений среднего и дополнительного профессионального образования а также для инженерно-технических работников.
Оглавление книги
Глава 1. Вилочные погрузчики
1.1. Самоходные погрузчики
1. 2. Особенности вилочных электропогрузчиков и вилочных автопогрузчиков общего назна¬чения
2. Особенности вилочных электропогрузчиков и вилочных автопогрузчиков общего назна¬чения
1.3. Устройство погрузчиков вилочного типа
1.3.1. Общие сведения
1.3.2. Примеры конструкций вилочных погрузчиков
1.3.3. Особенности грузоподъемных механизмов вилочных погрузчиков
1.3.4. Пример устройства грузоподъемного механизма вилочного автопогрузчика
Глава 2. Особенности элементов управления и индикации вилочного электропогрузчика и погрузчика с приводом от ДВС
2.1. Описание элементов управления и индикации на примере вилочного электропогрузчика
2.2. Описание мест нанесения маркировки, прикрепления информационных щитков и их содержания на примере вилочного электропогрузчика
2.3. График грузоподъемности вилочного захвата на примере
вилочного электропогрузчика
2.4. Описание элементов управления и индикации на примере вилочного погрузчика с приводом от ДВС
Глава 3. Применение вилочного погрузчика для выполнения погрузочно-разгрузочных работ
3. 1. Основы правил техники безопасности при подготовке к движению и при движении вилочного погрузчика
1. Основы правил техники безопасности при подготовке к движению и при движении вилочного погрузчика
3.1.1. Применение средств безопасности и действия машиниста (водителя) перед началом движения
3.1.2. Указания по вождению вилочного погрузчика
3.2. Безопасная остановка и парковка вилочного погрузчика
3.3. Выполнение движения вилочного электропогрузчика
3.4. Управление работой грузоподъемного механизма на примере вилочного электропогрузчика
3.5. Регулировка ширины захвата вил (положения зубьев) вилочного захвата грузоподъемного механизма на примере вилочного электропогрузчика
3.6. Прием, транспортирование и выгрузка груза вилочным погрузчиком
3.7. Дополнительные требования по технике безопасности при работе на вилочных погрузчиках
3.8. Пример инструкции по погрузо-разгрузочным работам
Глава 4. Устойчивость вилочного погрузчика
4.1. Общий центр тяжести и устойчивость вилочного погрузчика
4.2. Номинальная и фактическая грузоподъемности, зависимость между нагрузкой, и устойчивостью вилочного погрузчика
4. 3. Особенности испытаний на устойчивость вилочного погрузчика
3. Особенности испытаний на устойчивость вилочного погрузчика
с приводом от ДВС и вилочного погрузчика с электроприводом
Глава 5. Примеры инструкций по проведению технического обслуживания вилочного автопогрузчика и вилочного электропогрузчика
5.1. Пример инструкции по проведению технического обслуживания вилочного автопогрузчика
5.2. Пример инструкции по проведению технического обслуживания вилочного электропогрузчика
Глава 6. Диагностика ГМКПП и рулевого управления с насосом-дозатором погрузчика
Приложения. Примеры вилочных автопогрузчиков
и электропогрузчиков
arm64 — QEMU «-bios» vs. «-kernel» vs. «-device loader, file = …»
В качестве фона я запускаю QEMU-4.1.0 без операционной системы на сервере aarch64.
Есть несколько способов заставить QEMU загружать скомпилированный код в память. Я хотел бы понять, в чем заключаются основные различия, потому что я вижу совсем другое поведение, а документация не проливает света.
Рассмотрим эту первую командную строку:
qemu-system-aarch64 \
-SS \
-машина virt, secure = on, virtualization = on \
-m 512M \
-smp 4 \
-display none \
-нографический \
-полухостинг \
-serial mon: stdio \
-ядро my_file.эльф \
-загрузчик устройства, адрес = 0x40004000, cpu_num = 0 \
-загрузчик устройства, адрес = 0x40004000, cpu_num = 1 \
-загрузчик устройства, адрес = 0x40004000, cpu_num = 2 \
-загрузчик устройства, адрес = 0x40004000, cpu_num = 3 \
;
В другой оболочке, если я запускаю gdb, чтобы посмотреть, что QEMU загрузило в память, это в точности соответствует тому, что я ожидал. Фактически, в gdb есть встроенная команда для этого …
(gdb) сравнения разделов
Раздел .start, диапазон 0x40004000 - 0x40006164: соответствует.
Раздел .vectors, диапазон 0x40006800 - 0x40006f90: соответствует.Раздел .text, диапазон 0x40006fc0 - 0x4002ca7c: соответствует.
...
Раздел .stacks, диапазон 0x4207c120 - 0x420bc120: соответствует.
(gdb) x / 10x 0x40004000
0x40004000 <_start>: 0x14000800 0x00000000 0x00000000 0x00000000
...
 (gdb) x / 10x 0x40004000
0x40004000 <_start>: 0x14000800 0x00000000 0x00000000 0x00000000
...
(gdb) x / 10x 0x40004000
0x40004000 <_start>: 0x14000800 0x00000000 0x00000000 0x00000000
...
Отлично! Все в моем ELF находится по адресу 0x40004000, и я все это вижу в памяти, именно так, как я ожидал! Мое первое ядро загружается и работает, как я и ожидал.
Интересно отметить, что если я сбрасываю то, что находится в нулевой ячейке памяти, то там что-то загружается.Я не просил об этом. Я не загружал его явно. Я этого не выполняю. Его нет в моем ELF-файле. Я не знаю, что это и откуда это взялось. Мой GUESS состоит в том, что QEMU ПРЕДПОЛОЖИЛ, что мне нужен какой-то BIOS во флэш-памяти, и поместил его туда. Точно не знаю. Он также помещает что-то (маленькое) по адресу 0x40000000. Я тоже не знаю, что это … Я хочу быть осторожным, чтобы, если я что-то загружу, мы не наступим друг на друга …
- Моим первым вопросом становится: Могу ли я включить некоторые отладочные сообщения, чтобы понять, что QEMU и где загружает, и, возможно, даже ПОЧЕМУ?
Продолжение… Если я изменю свою командную строку, чтобы ЗАМЕНИТЬ переключатель «-kernel my_file.elf» переключателем «-bios my_file.elf» (не меняя ничего другого), и я повторю свой run / gdb, то я увижу две разные вещи ..
Во-первых, я вижу, что у меня все ядра работают. Мне не нужно использовать вызовы PSCI для их запуска. Хорошо, но я не думаю, что это имеет отношение к моей проблеме. Во-вторых ( ОЧЕНЬ важно ), моя память НЕ содержит того, что я ожидаю!
(gdb) сравнения разделов
Раздел .начало, диапазон 0x40004000 - 0x40006164: MIS-MATCHED!
Раздел .vectors, диапазон 0x40006800 - 0x40006f90: MIS-MATCHED!
Раздел .text, диапазон 0x40006fc0 - 0x4002ca7c: MIS-MATCHED!
...
Раздел .stacks, диапазон 0x4207c120 - 0x420bc120: соответствует.
(gdb) x / 8x 0x40000000
0x40004000 <_start>: 0x00000000 0x00000000 0x00000000 0x00000000
0x40004010 <_start + 16>: 0x00000000 0x00000000 0x00000000 0x00000000
(gdb) x / 8x 0x40006800
0x40006800 <имя_вектора>: 0x00000000 0x00000000 0x00000000 0x00000000
0x40006810 : 0x00000000 0x00000000 0x00000000 0x00000000
(gdb) x / 8x 0x40006fc0
0x40006800 <имя_символа>: 0x00000000 0x00000000 0x00000000 0x00000000
0x40006810 : 0x00000000 0x00000000 0x00000000 0x00000000
Все равно нулю.Я нигде не вижу кода MY , хотя таинственный код все еще загружается как на 0x0, так и на 0x4000000. Как и следовало ожидать, ядра немедленно умирают с исключением «Undefined Instruction», как только я ввожу «nexti» в свой gdb.
Хммм …
Хорошо, теперь я заменю «-bios my_file.elf» на «-device loader, file = my_file.elf». Я получаю тот же результат. Я не могу найти свой код в памяти.
- Что по-разному происходит внутри QEMU между -bios и -kernel? Где это задокументировано или где в источнике я могу следить за этим? Как мне лучше всего отладить это?
Спасибо добрый господин / госпожа!
Изменить:
Для отладки, кажется, все полезные / важные вещи находятся в «virt.в «…
More Edit (для добавления информации из «-device loader = my_file.elf»)
Моя командная строка:
/tools/gnu/qemu-4.1.0/bin/qemu-system-aarch64 \
-SS \
-машина virt, secure = on, virtualization = on \
-cpu cortex-a53 \
-d int \
-m 512M \
-smp 4 \
-display none \
-нографический \
-полухостинг \
-serial mon: stdio \
-загрузчик устройства, file = NEW_AT_ZERO.elf \
;
Вот некоторые из соответствующих разделов NEW_AT_ZERO.дис:
NEW_AT_ZERO.elf: формат файла elf64-littleaarch64
NEW_AT_ZERO.elf
архитектура: aarch64, флаги 0x00000112:
EXEC_P, HAS_SYMS, D_PAGED
начальный адрес 0x0000000000000000
Заголовок программы:
ЗАГРУЗИТЬ 0x0000000000010000 vaddr 0x0000000000000000 paddr 0x0000000000000000 выровнять 2 ** 16
filesz 0x00000000020b8120 memsz 0x00000000020b8120 флаги rwx
ПРИМЕЧАНИЕ выключено 0x0000000000043484 vaddr 0x0000000000033484 paddr 0x0000000000033484 align 2 ** 2
filesz 0x0000000000000024 memsz 0x0000000000000024 флаги r--
частные флаги = 0:
Разделы:
Idx Имя Размер VMA LMA File off Algn
0.начало 00002164 0000000000000000 0000000000000000 00010000 2 ** 2
СОДЕРЖАНИЕ, ALLOC, ЗАГРУЗИТЬ, ТОЛЬКО ДЛЯ ЧТЕНИЯ, КОД
1. векторы 00000790 0000000000002800 0000000000002800 00012800 2 ** 11
СОДЕРЖАНИЕ, ALLOC, ЗАГРУЗИТЬ, ТОЛЬКО ДЛЯ ЧТЕНИЯ, КОД
2 .text 00025bbc 0000000000002fc0 0000000000002fc0 00012fc0 2 ** 6
СОДЕРЖАНИЕ, ALLOC, ЗАГРУЗИТЬ, ТОЛЬКО ДЛЯ ЧТЕНИЯ, КОД
3 .bss 0000a904 0000000000028b80 0000000000028b80 00038b7c 2 ** 3
АЛЛОК
..
1020 7f2003d5 ffffff17 00000000 00000000. ..............
....
… но конечно …
GNU gdb (Linaro_GDB-2017.05.09) 7.12.1.20170417-git
Авторские права (C) 2017 Free Software Foundation, Inc.
Лицензия GPLv3 +: GNU GPL версии 3 или более поздней
Это бесплатное программное обеспечение: вы можете изменять и распространять его.
НИКАКИХ ГАРАНТИЙ в той степени, в которой это разрешено законом. Типа "показать копирование"
и "показать гарантию" для подробностей.
Этот GDB был настроен как "--host = x86_64-unknown-linux-gnu --target = aarch64-none-elf".Введите "показать конфигурацию" для получения подробной информации о конфигурации.
Инструкции по сообщению об ошибках см. В следующих разделах:
: 0x00000000 0x00000000 0x00000000 0x00000000
Generic Loader — документация QEMU
Это произведение лицензировано на условиях GNU GPL версии 2 или новее.Видеть файл КОПИРОВАНИЕ в каталоге верхнего уровня.
Устройство «загрузчик» позволяет пользователю загружать несколько изображений или значений в QEMU при запуске.
Загрузка данных в значения памяти
Загрузочное устройство позволяет устанавливать значения памяти из командной строки. Этот можно сделать, используя следующий синтаксис:
-загрузчик устройства, addr =, data = , data-len = \ [, data-be = ] [, cpu-num = ]
-
- Адрес для хранения данных.
-
<данные> - Значение, которое будет записано в адрес. Максимальный размер данных составляет 8 байтов.
-
- Длина данных в байтах. Этот аргумент должен быть включен, если аргумент данных.
-
<данные-be> - Установите значение true, если данные, которые должны быть сохранены на гостевой системе, должны быть записаны. как данные с прямым порядком байтов. По умолчанию записываются данные с прямым порядком байтов.
-
<номер процессора> - Номер адресного пространства ЦП, в котором должны быть данные. загружен.Если не указано, используется адресное пространство первого ЦП.
Все значения анализируются с использованием стандартного анализа QemuOps. Это позволяет пользователю для указания любых значений в любом поддерживаемом формате. По умолчанию значения будет анализироваться как десятичный. Чтобы использовать шестнадцатеричные значения, пользователь должен префикс числа с «0x».
Пример загрузки значения 0x8000000e по адресу 0xfd1a0104:
-загрузчик устройства, addr = 0xfd1a0104, data = 0x8000000e, data-len = 4
Установка программного счетчика ЦП
Загрузочное устройство позволяет настраивать ПК ЦП из командной строки.Этот можно сделать, используя следующий синтаксис:
- загрузчик устройства, адрес =, cpu-num =
-
- Значение, используемое в качестве ПК ЦП.
-
<номер процессора> - Номер ЦП, чей ПК должен быть установлен на указанное значение.
Все значения анализируются с использованием стандартного анализа QemuOpts. Это позволяет пользователю для указания любых значений в любом поддерживаемом формате. По умолчанию значения будет анализироваться как десятичный.Чтобы использовать шестнадцатеричные значения, пользователь должен префикс числа с «0x».
Пример установки 0x8000 для компьютера CPU 0:
- загрузчик устройства, адрес = 0x8000, номер процессора = 0
Загрузка файлов
Загрузочное устройство также позволяет загружать файлы в память. Он может загружать ELF, Исполняемые форматы U-Boot и Intel HEX, а также необработанные образы. Синтаксис: показано ниже:
-загрузчик устройства, file =
[, addr = ] [, cpu-num = ] [, force-raw = ]
-
<файл> - Файл для загрузки в память
-
- Адрес памяти, куда должен быть загружен файл.Это необходимо для необработанных изображений и игнорируется для необработанных файлов.
-
<номер процессора> - Определяет используемый ЦП. Это
необязательный аргумент и приведет к тому, что ПК ЦП будет настроен на
адрес памяти, куда загружается необработанный файл или точка входа
указанный в заголовке исполняемого формата. Этот вариант должен только
использоваться для загрузочного образа. Это также приведет к тому, что изображение будет
записывается в адресное пространство указанного ЦП. Если не указано иное,
по умолчанию CPU 0.
— установка force-raw = on заставляет файл обрабатываться как необработанное изображение. Это можно использовать для загрузки поддерживаемых исполняемые форматы, как если бы они были необработанными.
Все значения анализируются с использованием стандартного анализа QemuOpts. Это позволяет пользователю для указания любых значений в любом поддерживаемом формате. По умолчанию значения будет анализироваться как десятичный. Чтобы использовать шестнадцатеричные значения, пользователь должен префикс числа с «0x».
Пример загрузки файла ELF, который будет загружать CPU0, показан ниже:
-загрузчик устройства, файл =./images/boot.elf,cpu-num=0
Ограничения и ToDos
На данный момент предполагается, что если вы укажете cpu-num, то вы также хотите установить ПК. Это может быть не всегда. В будущее внутреннее состояние «set_pc» (которое существует в универсальном загрузчике сейчас) должен быть открыт для пользователя, чтобы он мог выбрать, установлен или нет.
5 самых популярных погрузчиков для журналов
КОГДА БЫЛИ ИЗОБРЕЛИ СКОРОСТНЫЕ ПОГРУЗЧИКИ?
Магазинный погрузчик Общая информация
АНАТОМИЯ СКОРОСТНЫХ ПОГРУЗЧИКОВ
У вас есть три основных типа скоростных погрузчиков.Каждый из них имеет свои собственные рабочие части и различные основные рабочие функции. Их использование будет совсем другим.
Револьверный погрузчик
Револьверные погрузчики, простые и точные, бывают разных стилей, но, как правило, работают с той же мощностью.
Вы загружаете каждую отдельную пулю в заряжающий, сначала основание, и либо поворачиваете ручку, либо тянете поршень, чтобы зафиксировать их на месте.
Итак, у вас есть пулевые отверстия, активатор (ручка / поршень) и запорный механизм.
Этот замок срабатывает, когда вы встряхиваете активатор, который будет удерживать приклад пули и удерживать ее на месте.
В этот момент вы можете перевернуть заряжающий, чтобы убедиться, что пули не выпадают.
Если у вас есть ручка, то, скорее всего, это металлическая защелка. Они не работают так долго, как подпружиненные системы, которые являются синонимом рукояток плунжера.
Это позволяет вам заряжать пули быстрее, так как вам не нужно возиться с ручкой.
Загрузчик магазина с пружинным зажимом
Магазин загружается через один конец (нижний), который является одной из трех рабочих частей.
Затем вы берете заряжающий (пластиковый гребень с пазом) и проводите им по стопке патронов, лежащих лицом вниз.
Держится за основу каждой пули. Поднимите его и установите на основную деталь. Теперь у вас есть небольшая пластиковая деталь, которая проходит поверх погрузчика.
Вы толкаете его вниз, как патрон, и пружина внутри позволяет патрону вдавиться в магазин.
Он выскакивает, и пули поднимаются за ним, оставаясь в магазине, чтобы их можно было зарядить в ваше ружье.
Они позволяют зарядить 9-мм пистолет примерно за 3-5 секунд. Несколько секунд, чтобы зарядить магазин и захватить пули, и одну секунду, чтобы вдавить его в магазин. Престо.
Камерные погрузчики
Как и в нашем верхнем отборе, здесь используется весь магазин, который загружается в нижнюю часть пластиковой камеры и прочно удерживает ее.
Вы должны щелкнуть по нему, чтобы оставаться в верхней части журнала.Обычно они состоят из трех основных частей.
У вас есть первая часть камеры, которая остается неподвижной. Это основа устройства, которое крепится к вашему магазину.
Вторая часть открывается, чтобы магазин в первую очередь мог поместиться внутрь. Третий и самый важный — загрузчик.
Эта маленькая деталь в виде спускового крючка — это то, что берет кончик пули и вдавливает ее в магазин.
Вы отпускаете основную камеру так, что она открывается, вставляете пулю, сжимаете ее, а затем нажимаете спусковой переключатель вниз, чтобы пуля попала в магазин.
Благодаря минимальному количеству рабочих частей они прослужат вам долгие годы. Доступны два подтипа: один для двойных стопок, другой для одинарных.
Загрузчики журналов Видео
МА загрузчик для AR-15 | Среднее оружие
ОПИСАНИЕ
ПРИМЕЧАНИЕ. Погрузчик MA (как одиночный, так и трехкомпонентный) в настоящее время задерживается до 14-21 дней. Заказы будут отправлены в том порядке, в котором они размещены.
НОВАЯ ЦЕНА! НОВАЯ рекомендованная цена 34 доллара США.99. $ 5.00 ВЫКЛ НА ОГРАНИЧЕННОЕ ВРЕМЯ. СЕЙЧАС $ 29,99! Теперь доставка.
Наш MA Loader — это устройство для заряжания 10-зарядных патронов, соответствующее требованиям Калифорнии, которое позволит вам безопасно и эффективно перезаряжать фиксированный магазин без необходимости ломать огнестрельное оружие. Просто поместите загрузчик MA в порт для выброса вашего AR-15 и нажмите ползунок с кольцом для большого пальца, чтобы быстро загрузить или перезагрузить. Это так просто! **
Самое приятное то, что использование MA Loader с фиксированным магазином избавляет от необходимости регистрировать винтовку в штате Калифорния.Если выезд из штата Калифорния не входит в ваши планы, законные владельцы оружия могут пользоваться своим AR-15 с минимальными нарушениями и при полном соблюдении новых законов.
Непредвиденным последствием введения новых навязчивых законов Калифорнии является безопасность. Теперь, когда нет абсолютно никакой возможности заряжать разряженный AR-15 для защиты дома в разумные сроки, владельцы оружия неизбежно будут держать их заряженными все время. Это потенциально может поставить под угрозу людей, которых мы обязаны защищать.Использование MA Loader предотвращает эту проблему и является самым безопасным решением для всех владельцев AR-15 в любом месте. После установки он полностью выводит оружие из строя. Просто держите свой AR-15 в разряженном состоянии с помощью загрузчика MA Loader поблизости. Одно нажатие, и вы загружены и готовы.
Множество штатов продолжают попирать права законопослушных граждан. Используйте спроектированный MEAN загрузчик MA, чтобы наилучшим образом использовать свое оружие по назначению.
Лучше, безопаснее, быстрее
Примечание: Для использования нашего загрузчика MA Loader не требуется никаких изменений в вашем AR-15! В Интернете по-прежнему ходит некоторая путаница по поводу необходимости модифицировать винтовку для использования нашего загрузчика MA.Наша рампа подачи MA опционально и , никаких изменений не требуется! Вам НЕ нужно покупать нашу рампу подачи MA, чтобы использовать загрузчик MA на винтовке MIL Spec или для модификации винтовки каким-либо образом! MA Feed Ramp строго ДОПОЛНИТЕЛЬНО , если вы хотите немного улучшить скорость перезарядки, но, опять же, в этом нет необходимости.
Примечание: НЕ работает с левым верхом.
Международные продажи: ДА. MEAN продает напрямую только клиентам из США.Для международных клиентов, пожалуйста, свяжитесь с Brownells , чтобы узнать, везут ли они нашу продукцию в вашу страну. Более 75 лет Brownells поставляет качественные инструменты для оружейного дела, запасные части для оружия и оказывает услуги отрасли производства огнестрельного оружия.
ПРЕДУПРЕЖДЕНИЕ: При обращении с этим продуктом и обращении с огнестрельным оружием или его частями вы можете подвергнуться воздействию химических веществ, которые, как известно в штате Калифорния, вызывают рак и врожденные дефекты или другие нарушения репродуктивной функции, включая свинец, соединения свинца и нефтепродукты.Для получения дополнительной информации посетите www.P65Warnings.ca.gov.
cypresssemiconductorco / Firmware-loader: инструмент командной строки для обновления программно-аппаратного обеспечения низкого уровня KitProg / отладки коммуникационных программ на Cypress kits
Обзор
FW-loader — это кроссплатформенный инструмент командной строки, который можно использовать для обновления KitProg3 FW на наборах Cypress или MiniProg4. Загрузите последний выпуск, который включает KitProg3 v2.21.1005.
Существует пакет для каждой из следующих операционных систем:
Со страницы выпуска загрузите и распакуйте соответствующий zip-архив для вашей ОС.Вы можете положить инструмент в любое удобное место. ModusToolbox 2.0 или более новая версия также устанавливает этот инструмент, но в репозитории GitHub вы всегда можете найти последнюю версию.
После установки откройте командное окно в каталоге bin инструмента и следуйте инструкции ниже.
В ОС Linux запустите сценарий udev_rules \ install_rules.sh перед первым запуском FW-загрузчик.
В версии MacOS Catalina и более поздних версиях вы можете увидеть диалоговое окно, в котором Apple не может проверить этот пакет на наличие вредоносного программного обеспечения.В этом случае следуйте инструкциям Apple.
Параметры командной строки
—help (или без аргументов) — отображает список поддерживаемых команд с их описания.
—device-list — отображает список подключенных устройств.
—update-kp3 [имя-устройства] — Обновить прошивку указанного устройства до KitProg3.
—update-kp2 [имя-устройства] — Понижает версию микропрограммы указанного устройства до KitProg2.
—mode [имя-устройства] — Включает режим KitProg3 определенного устройства. Поддерживаемые режимы: kp3-hid, kp3-bulk, kp3-bootloader, kp3-daplink. На хостах Windows режим «kp3-bulk» не может поддерживать одновременное соединение I2C / SPI (например, для настройки CapSense) — вместо этого переключитесь на «kp3-hid».
Если у вас подключено только одно устройство, [имя-устройства] указывать необязательно. Если требуется имя устройства, используйте имя устройства из команды «—device-list». Для обновления прошивки всех подключенных устройств KitProg3 используйте спецификатор all.
Переключение режимов в KitProg3
Нажмите кнопку переключения режимов на комплекте, чтобы переключить режимы. Если комплект не поддерживает режим DAPLink, переключатель режима не действует.
Кроме того, комплект CY8CKIT-062S2-43012 поддерживает специальный режим работы, который позволяет использовать два соединения UART вместо одного UART плюс мостовое соединение (например, USB-I2C или USB-SPI).
Вы не можете войти в UARTx2, если комплект находится в режиме DAPLink. Когда комплект находится в режиме CMSIS-DAP Bulk или HID, нажмите и удерживайте переключатель режима не менее двух секунд.В этом режиме желтый светодиод мигает с частотой 2 Гц. Для выхода нажмите и удерживайте переключатель режима не менее двух секунд. Вы вернетесь в массовый режим CMSIS-DAP.
Банкноты
KitProg2 поддерживает два режима: собственный и CMSIS DAP. Только проприетарный режим поддерживает загрузчик. Вы должны быть в проприетарном режиме для KitProg2 быть видимым FW-загрузчику. Используйте кнопку переключения режима для переключения KitProg2 в проприетарный режим.
Для KitProg3 кнопка переключения режима (SW3) переключает между CMSIS DAP bulk и Режимы DAPLink.Вы можете использовать командную строку, чтобы перейти в устаревший режим, CMSIS DAP используя HID конечные точки.
MiniProg4 не поддерживает прошивку KitProg2. Следующие симптомы показывают, что Прошивка KitProg2 установлена на MiniProg4:
Если на MiniProg4 установлена прошивка KitProg2 — переключите устройство в режим Bootloader для восстановления работоспособности устройства:
— отключить MiniProg4 от USB
— удерживая нажатой кнопку выбора режима на комплекте, подключите кабель USB
— светодиод режима мигает, указывая на то, что комплект находится в режиме загрузчика
— отпустить кнопку
Выполните команду «—update-kp3», как описано выше.
Пакеты FOSS
FW-Loader использует некоторые пакеты с открытым исходным кодом. Пакеты FOSS расположены по адресу https://www.cypress.com/documentation/software-and-drivers/modustoolbox-foss-packages
.Дополнительная информация
Примечания к выпускуFw-loader
12.04 — двойная загрузка, устройство для загрузчика
Если вы хотите установить его в 160 ГБ вместе с Windows, загрузчик должен быть установлен в / dev / sdb
Теперь, если у вас есть жесткий диск объемом 160 ГБ, который еще не разбит на разделы, вам нужно освободить для него место.Если вы этого не сделали при установке Windows, тогда он займет все пространство / dev / sdb, за исключением загрузочного раздела 100 МБ на sdb1, и поэтому у Mint не будет раздела для установки внутри / dev / sdb
.Осталось только загрузить окна, инструменты администрирования, войти в управление дисками или что-то в этом роде и попытаться «сжать» или уменьшить объем на вашем фактическом разделе Windows 160 ГБ, чтобы освободить место для Mint. Обратите внимание, что программа сама сообщит вам, что рекомендуется сначала дефрагментировать раздел, чтобы вы могли максимизировать размер сжимаемых МБ.
После того, как вы уменьшите раздел Windows, оставьте остальное как нераспределенное пространство, и при установке Mint ваш / dev / sdb должен выглядеть так:
/ dev / sdb1 — ~ 100MB — NTFS — Flags: boot (это место для загрузчика) / dev / sdb2 — сжатие 160 ГБ — NTFS — Windows (раздел Windows = / dev / sdb3 — ShrinkedVolume (ГБ) — расширенный / dev / sdb4 — XGB — linux-swap (обмен монетами) / dev / sdb5 — RestofShrinked (ГБ) — ext4 — это раздел / path (раздел mint)
Так должно выглядеть в установке Mint, загрузчик всегда устанавливается на первой части диска.Остальное довольно распространено, вам нужно только уменьшить фактический объем раздела Windows, чтобы освободить место для Mint и его собственного раздела подкачки.
Задание загрузчика дает правильные указания для загрузки ОС после того, как жесткий диск был вызван BIOS для загрузки. Если вы пытаетесь установить ОС на 2-й жесткий диск, загрузчик будет расположен на 2-м жестком диске (что позволит вам выбрать ОС Windows / Mint). На первом жестком диске есть другой загрузчик на тот момент, когда BIOS пытается с него загрузиться (поэтому он предоставит вам несколько вариантов, даже если установлен только Ubuntu, например, восстановление, записи старых ядер, memtest +..).
Выбор того, какой жесткий диск запускается первым, зависит от настроек BIOS.
Embedded Linux — Часть 1 Загрузчик
Это серия блогов из трех частей, в которых объясняется полная процедура кросс-компиляции
- Загрузчик
- Ядро / ОС
- Файловая система
Это будет сделано для процессоров ARM. платформа разработки.
Вкратце, в этой серии блогов объясняется, как настроить встроенный Linux-компьютер, который соответствует вашим потребностям.
Предварительные требования для среды разработки
- Linux-машина, на которой работает любой вариант Ubuntu, Fedora или Arch Linux.
- Подключение к Интернету.
Необходимое оборудование
Плата разработки на основе 1.ARM.
a. Это очень важно, так как процесс сборки и кросс-компилятор, который мы выбираем, зависят от типа процессора. В этой серии блогов мы используем разработку beaglebone black, основанную на архитектуре ARMv7.
Карта Micro SD 2,4 / 8 ГБ.
3. Переходник с USB на последовательный.
Темы, обсуждаемые в этом документе
- Что такое загрузчик?
- Das U-Boot — универсальный загрузчик
- Этапы загрузки при загрузке
- Загрузка исходного кода
- Краткая информация о каталогах и предоставляемых им функциях
- Кросс-компиляция загрузчика для целевой платформы на базе ARM
- Настройка переменных среды
- Начать сборку
- Карта Micro SD Процедура загрузки в цвете beaglebone black
Что такое загрузчик?
На этот вопрос так много ответов, но если вы посмотрите на суть всех ответов, там будет какая-то инициализация.Короче говоря, это часть программного обеспечения, которая запускается, как только вы включаете свое оборудование. Аппаратным устройством может быть что угодно: от мобильных телефонов, маршрутизаторов, микроволновых печей, интеллектуального телевизора до самого быстрого суперкомпьютера в мире. В конце концов, у всего есть начало, верно?
Причина, по которой я сказал, что существует так много способов ответить на этот вопрос, заключается в том, что варианты использования каждого устройства различаются, и нам нужно тщательно выбирать загрузчик, который инициализирует устройство. На это уходит так много времени на исследования и принятие решений, чтобы убедиться, что инициализируемые устройства абсолютно необходимы.Всем нравится, что их устройства быстро загружаются.
Во встроенных системах загрузчик — это специальная программа, основная цель которой — загрузить ядро и передать ему управление. Для этого ему необходимо инициализировать необходимые периферийные устройства, которые помогают устройству выполнять намеченные функции. Другими словами, он инициализирует только абсолютно необходимые периферийные устройства и передает управление ОС, также известной как ядро.
Das U-Boot — универсальный загрузчик
U-Boot — самый популярный загрузчик для встраиваемых устройств на базе Linux.Он выпущен с открытым исходным кодом под лицензией GNU GPLv2. Он поддерживает широкий спектр микропроцессоров, таких как MIPS, ARM, PPC, Blackfin, AVR32 и x86. Он даже поддерживает платформы nios на базе FPGA. Если ваше оборудование основано на каком-либо из этих процессоров, и если вы ищете загрузчик, лучше всего сначала попробовать U-Boot. Он также поддерживает различные методы загрузки, что очень необходимо в аварийных ситуациях.
Например, он поддерживает загрузку с USB, SD-карты, NOR и NAND flash (энергонезависимая память).Он также поддерживает загрузку ядра Linux из сети с использованием TFTP. Список файловых систем, поддерживаемых U-Boot, огромен. Таким образом, вы охватываете все аспекты, которые требуются от загрузчика и многое другое.
И последнее, но не менее важное: у него есть интерфейс командной строки, который дает вам очень легкий доступ к нему и пробует много разных вещей, прежде чем завершить свой дизайн. Вы настраиваете U-Boot для различных методов загрузки, таких как MMC, USB, NFS или NAND, и это позволяет вам проверять физическую оперативную память на любые проблемы.
Теперь дизайнер должен выбрать, какое устройство он хочет, а затем использовать U-Boot в своих интересах.
Этапы загрузки при загрузке
Для начала, U-Boot является загрузчиком как первого, так и второго этапов. Когда U-Boot скомпилирован, мы получаем два образа: изображения первого этапа (MLO) и второго этапа (u-boot.img). Он загружается системным кодом ROM (этот код находится внутри SoC и уже предварительно запрограммирован) с поддерживаемого загрузочного устройства. Код ПЗУ проверяет наличие различных доступных загрузочных устройств.И запускает выполнение с устройства, которое может загружаться. Этим можно управлять с помощью перемычек, хотя также существуют некоторые методы на основе резисторов. Поскольку каждая платформа отличается, рекомендуется ознакомиться с таблицей данных платформ для получения более подробной информации.
Загрузчик этапа 1 иногда называют маленьким SPL (Secondary Program Loader). SPL выполнит начальную конфигурацию оборудования и загрузит остальную часть U-Boot, то есть загрузчик второй ступени. Независимо от того, используется ли SPL, U-Boot выполняет загрузку как на первом, так и на втором этапе.
На первом этапе U-Boot инициализирует контроллер памяти и SDRAM. Это необходимо, поскольку от этого зависит остальная часть выполнения кода. В зависимости от списка устройств, поддерживаемых платформой, он инициализирует остальные. Например, если ваша платформа поддерживает загрузку через USB и не поддерживает сетевое подключение, то U-Boot можно запрограммировать на то же самое.
Если вы планируете использовать ядро Linux, то настройка контроллера памяти — единственное обязательное, что ожидается от ядра Linux.Если контроллер памяти не инициализирован должным образом, ядро Linux не сможет загрузиться.
Блок-схема целевой
Выше представлена блок-схема AM335X SoC.
Загрузка исходного кода
Исходный код U-Boot поддерживается с помощью управления версиями git. Используя git, мы можем клонировать последний исходный код из репо.
kasi @ kasi-desktop: ~ / git $ git clone git: //git.denx.de/u-boot.git
Краткая информация о каталогах и предоставляемых функциях
arch -> Содержит зависящие от архитектуры код.Это фрагмент кода, который инициализирует периферийные устройства, относящиеся к процессору и плате.
плата → Источник как в своде, так и в каталоге платы работают в тандеме для инициализации памяти и других устройств.
cmd -> Содержит код, который добавляет поддержку командной строки для выполнения различных действий в зависимости от требований разработчика. Например, утилиты командной строки предназначены для стирания флэш-памяти NAND и ее перепрограммирования. В следующем блоге мы будем использовать аналогичные команды.
configs -> Содержит сведения о конфигурации на уровне платформы. Это очень сильно зависит от платформы. Конфигурации очень похожи на статическое сопоставление со ссылкой на таблицу данных платформы.
drivers -> Этот каталог требует особого упоминания, поскольку он поддерживает множество устройств:
Каждый подкаталог в каталоге драйверов соответствует определенному типу устройства. Эта структура соблюдается в соответствии с ядром Linux. Например, все сетевые драйверы накапливаются в сетевом каталоге:
kasi @ kasi-desktop: ~ / git / u-boot $ ls drivers / net / -l всего 2448 -rw-rw-r-- 1 каси каси 62315 11 ноября 15:05 4xx_enet.c -rw-rw-r-- 1 kasi kasi 6026 11 ноября 15:05 8390.h
Это гарантирует, что код не раздувается, и нам будет намного легче ориентироваться и вносить необходимые изменения.
fs -> Содержит код, который добавляет поддержку файловых систем. Как упоминалось ранее, U-Boot имеет широкую поддержку файловой системы. Он поддерживает как файловую систему только для чтения, такую как cramfs, так и журналируемую файловую систему, такую как jffs2, которая используется на устройствах на основе флэш-памяти NAND.
include -> Это очень важный каталог в U-Boot.Он не только содержит файлы заголовков, но и файлы, которые определяют информацию о платформе, такую как поддерживаемые скорости передачи, начальный адрес RAM, размер стека, аргументы командной строки по умолчанию и т. Д.
lib -> Содержит поддержку файлов библиотеки. Они предоставляют необходимые вспомогательные функции, используемые U-Boot.
net -> Содержит поддержку сетевых протоколов, таких как ARP, TFTP, Ping, Bootp и т. Д.
сценарии и инструменты -> Содержит вспомогательные сценарии для создания образов и двоичных файлов.Он содержит сценарии для создания файла исправления (надеюсь, с некоторыми полезными исправлениями) в правильном формате, если мы планируем отправить его сообществу разработчиков.
Имея доступный исходный код и некоторое понимание структуры каталогов, позвольте нам сделать то, что мы действительно хотим сделать, то есть создать загрузчик.
Поскольку целевая плата, которую мы используем, основана на процессоре ARM, нам понадобится кросс-компилятор, который поможет нам создавать двоичные файлы для работы на этом процессоре. Для этого есть много вариантов.Linaro предоставляет новейший кросс-инструмент для процессоров на базе ARM, и его очень легко получить. По этой причине мы выбрали кросс-инструмент, предоставляемый linaro.
Кросс-компиляция загрузчика для целевой платформы на базе ARM
Для кросс-компиляции нам может потребоваться загрузить набор инструментов с веб-сайта linaro, используя ссылку ниже:
kasi @ kasi-desktop: ~ / git $ wget https://releases.linaro.org/components/toolchain/binaries/latest/arm-linux-gnueabihf/gcc-linaro-6.1.1-2016.08-x86_64_arm-linux-gnueabihf.tar.xz
Цепочка инструментов поставляется в сжатом виде в виде tar-файла, и мы можем распаковать его с помощью следующей команды:
kasi @ kasi-desktop: ~ / git $ tar xf gcc-linaro-6.1. 1-2016.08-x86_64_arm-linux-gnueabihf.tar.xz
Настройка переменных среды
С помощью цепочки инструментов предварительной сборки нам нужно настроить несколько переменных среды, например путь к цепочке инструментов, прежде чем приступить к компиляции U-Boot. Ниже приведены команды оболочки, которые нам нужно выполнить.
экспорт PATH =/ gcc-linaro-6.1.1-2016.08-x86_64_arm-linux-gnueabihf / bin: $ PATH; экспорт CROSS_COMPILE = arm-linux-gnueabihf- экспорт ARCH = arm;
В нашем рабочем пространстве
Точная команда с нашей машины:
kasi @ kasi-desktop: ~ / git / u-boot $ export PATH = / home / kasi / git / gcc-linaro-6.1.1-2016.08-x86_64_arm-linux-gnueabihf / bin: $ ПУТЬ kasi @ kasi-desktop: ~ / git / u-boot $ export CROSS_COMPILE = arm-linux-gnueabihf- kasi @ kasi-desktop: ~ / git / u-boot $ export ARCH = arm;
Дважды проверьте приведенные выше команды, чтобы они соответствовали вашему рабочему пространству.
Файл конфигурации
Когда все настроено, пора выбрать правильный файл конфигурации и начать компиляцию.
Плата, которую мы используем, выполнена в черном цвете бигль-кость и основана на SoC AM3358 от TI.
Итак, нам нужно искать похожее имя в include / configs . Этой плате соответствует файл « am335x_evm.h »
Итак, из командной строки нам нужно выполнить следующую команду:
kasi @ kasi-desktop: ~ / git / u-boot $ сделать am335x_evm_defconfig Скрипты HOSTCC / базовый / fixdep Скрипты HOSTCC / kconfig / conf.о ОТПРАВЛЯЕМЫЕ скрипты / kconfig / zconf.tab.c ОТПРАВЛЯЕМЫЕ скрипты / kconfig / zconf.lex.c ОТПРАВЛЯЕМЫЕ скрипты / kconfig / zconf.hash.c Скрипты HOSTCC / kconfig / zconf.tab.o Скрипты HOSTLD / kconfig / conf # # конфигурация записана в .config # kasi @ kasi-desktop: ~ / git / u-boot $
При выполнении указанной выше команды в фоновом режиме происходило множество вещей. Мы не хотим углубляться в это, поскольку это может быть совсем другой блог…!
Мы создали файл конфигурации, который используется U-Boot в процессе сборки.Для тех, кто хочет узнать больше, откройте файл « .config » и проверьте его. Здесь можно напрямую изменить конфигурационный файл, но мы обсудим это позже.
Запустить сборку
Чтобы начать сборку, нам нужно дать наиболее часто используемую / злоупотребляемую команду в жизни программиста встроенного Linux, а именно make.
kasi @ kasi-desktop: ~ / git / u-boot $ make скрипты / kconfig / conf --silentoldconfig Kconfig CHK include / config.h UPD включает / конфиг.час Примеры CC / standalone / hello_world.o Примеры LD / автономный / hello_world Примеры OBJCOPY / standalone / hello_world.srec Примеры OBJCOPY / standalone / hello_world.bin СПД u-boot.lds LD u-boot OBJCOPY u-boot-nodtb.bin ./scripts/dtc-version.sh: строка 17: dtc: команда не найдена ./scripts/dtc-version.sh: строка 18: dtc: команда не найдена *** Ваш dtc слишком старый, пожалуйста, обновите до dtc 1.4 или новее Makefile: 1383: рецепт для цели 'checkdtc' не выполнен make: *** [checkdtc] Ошибка 1 kasi @ kasi-desktop: ~ / git / u-boot $
Если вы впервые компилируете U-Boot, есть вероятность, что вы получите указанную выше ошибку.Поскольку на машине сборки, которую мы используем, не был установлен пакет device-tree-compiler , мы получили указанную выше ошибку.
Установка зависимости (если есть)
kasi @ kasi-desktop: ~ / git / u-boot $ sudo apt-cache search dtc [sudo] пароль для каси: device-tree-compiler - Компилятор дерева устройств для деревьев плоских устройств kasi @ kasi-desktop: ~ / git / u-boot $ sudo apt install device-tree-compiler
Снова make
kasi @ kasi-desktop: ~ / git / u-boot $ make ПРОВЕРКА включить / config / uboot.релиз CHK include / generated / version_autogenerated.h
Simple ls -l покажет загрузчик первой стадии и загрузчик второй стадии.
kasi @ kasi-desktop: ~ / git / u-boot $ ls -l всего 9192 drwxrwxr-x 2 каси каси 4096 11 ноября 15:05 api drwxrwxr-x 18 каси каси 4096 11 ноя 15:05 арка drwxrwxr-x 220 kasi kasi 4096 11 ноя 15:05 доска drwxrwxr-x 3 каси каси 12288 14 ноя 13:02 cmd drwxrwxr-x 5 kasi kasi 12288 14 ноя 13:02 общие -rw-rw-r-- 1 каси каси 2260 11 ноя 15:05 конфиг.мк drwxrwxr-x 2 kasi kasi 65536 11 ноя 15:05 конфиги drwxrwxr-x 2 kasi kasi 4096 14 ноя 13:02 диск drwxrwxr-x 8 каси каси 12288 11 ноя 15:05 doc drwxrwxr-x 51 каси каси 4096 14 ноя 13:02 драйверы drwxrwxr-x 2 kasi kasi 4096 14 ноя, 13:03 dts drwxrwxr-x 4 kasi kasi 4096 11 ноября 15:05 примеры drwxrwxr-x 12 каси каси 4096 14 ноя 13:03 фс drwxrwxr-x 29 kasi kasi 12288 11 ноября 18:48 включить -rw-rw-r-- 1 каси каси 1863 11 ноября 15:05 Kbuild -rw-rw-r-- 1 каси каси 12416 11 ноября 15:05 Kconfig drwxrwxr-x 12 каси каси 4096 14 ноября 13:03 lib drwxrwxr-x 2 kasi kasi 4096 11 ноя 15:05 Лицензии -rw-rw-r-- 1 каси каси 11799 11 ноября 15:05 ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ -rw-rw-r-- 1 каси каси 54040 11 ноября 15:05 Makefile -rw-rw-r-- 1 каси каси 79808 14 ноября 13:03 MLO -rw-rw-r-- 1 каси каси 79808 14 ноября 13:03 MLO.байтовый обмен drwxrwxr-x 2 kasi kasi 4096 14 ноя, 13:03 net drwxrwxr-x 6 kasi kasi 4096 11 ноя, 15:05 сообщение -rw-rw-r-- 1 каси каси 223974 11 ноября 15:05 ПРОЧИТАТЬ drwxrwxr-x 5 kasi kasi 4096 11 ноя 15:05 скрипты -rw-rw-r-- 1 каси каси 17 ноя 11 15:05 snapshot.commit drwxrwxr-x 12 каси каси 4096 14 ноя, 13:03 spl -rw-rw-r-- 1 каси каси 75282 14 ноября 13:03 System.map drwxrwxr-x 10 kasi kasi 4096 14 ноября 13:03 test drwxrwxr-x 15 kasi kasi 4096 14 ноября 13:02 инструменты -rwxrwxr-x 1 каси каси 3989228 14 ноя, 13:03 u-boot -rw-rw-r-- 1 каси каси 466702 14 ноя, 13:03 u-boot.мусорное ведро -rw-rw-r-- 1 каси каси 0 14 ноября 13:03 u-boot.cfg.configs -rw-rw-r-- 1 каси каси 36854 14 ноября 13:03 u-boot.dtb -rw-rw-r-- 1 каси каси 466702 14 ноября 13:03 u-boot-dtb.bin -rw-rw-r-- 1 каси каси 628808 14 ноября 13:03 u-boot-dtb.img -rw-rw-r-- 1 каси каси 628808 14 ноября 13:03 u-boot.img -rw-rw-r-- 1 каси каси 1676 14 ноября 13:03 u-boot.lds -rw-rw-r-- 1 каси каси 629983 14 ноября 13:03 u-boot.map -rwxrwxr-x 1 каси каси 429848 14 ноября 13:03 u-boot-nodtb.bin -rwxrwxr-x 1 каси каси 1289666 14 ноя, 13:03 u-boot.srec -rw-rw-r-- 1 каси каси 147767 14 ноября 13:03 u-boot.sym kasi @ kasi-desktop: ~ / git / u-boot $
MLO — это загрузчик первой ступени, а u-boot.img — загрузчик второй ступени.
При наличии загрузчика пора разбить карту Micro SD на разделы, загрузить эти образы и протестировать их на целевом компьютере.
Раздел
Мы используем карту Micro SD на 8 ГБ и используем «gparted» (инструмент для создания разделов на основе графического интерфейса) для ее разделения. Это гораздо более простой подход — использовать gparted и создавать файловые системы.Мы создали два раздела:
1. FAT16 размером 80 МБ с включенным флагом загрузки.
2. EXT4 размером более 4ГБ.
Выбор размера раздела — это возможность и личный выбор. Здесь важно отметить, что для раздела FAT16 установлен флаг загрузки. Это нужно нам для загрузки устройства с помощью карты Micro SD. Пожалуйста, посмотрите изображение ниже, чтобы получить четкое представление о разделах на карте Micro SD.
После создания разделов на карте Micro SD извлеките карту из машины сборки и вставьте ее снова.В большинстве современных дистрибутивов разделы на карте Micro SD монтируются автоматически, что подтверждает правильность создания разделов. Это поможет нам перекрестно проверить созданные разделы.
Скопируйте изображения
Теперь пора скопировать скомпонованные изображения на карту Micro SD. Когда карта Micro SD вставляется в машину сборки, она автоматически монтируется в каталог / media / kasi / BOOT .
kasi @ kasi-desktop: ~ / git / u-boot $ mount / dev / sdc2 на / media / kasi / fs типа ext4 (rw, nosuid, nodev, relatime, data = order, uhelper = udisks2) / dev / sdc1 на / media / kasi / BOOT type vfat (rw, nosuid, nodev, relatime, uid = 1000, gid = 1000, fmask = 0022, dmask = 0022, codepage = 437, iocharset = iso8859-1, shortname = смешанный, showexec, utf8, flush, errors = remount-ro, uhelper = udisks2) Нам нужно скопировать только MLO и u-boot.img в раздел BOOT карты micro SD. kasi @ kasi-desktop: ~ / git / u-boot $ cp MLO / media / kasi / BOOT / kasi @ kasi-desktop: ~ / git / u-boot $ cp u-boot.img / media / kasi / BOOT / kasi @ kasi-desktop: ~ / git / u-boot $
С помощью приведенных выше команд мы загрузили загрузчик первой стадии, а также загрузчик второй стадии в загрузочную карту Micro SD.
Карта Micro SD Процедура загрузки в черном цвете beaglebone
Поскольку целевая плата имеет слот для карт eMMC и MicroSD, при включении она пытается загрузиться с обоих мест.Чтобы убедиться, что он загружается с карты MicroSD, нам нужно удерживать кнопку рядом с слотом для карты MicroSD нажатой во время подачи питания на устройство. Это гарантирует, что плата первой видит карту MicroSD и загружает загрузчик первого и второго этапов, которые мы только что скопировали туда.
На приведенной выше блок-схеме показана процедура загрузки целевого устройства.
Последовательный заголовок
На приведенной выше диаграмме крупным планом показаны подробности заголовка последовательного порта этой цели. Вы должны подключить свои распиновки от USB к последовательному кабелю TTL (если вы его используете) к этим контактам на цели, чтобы увидеть журнал ниже.
Ниже представлен вывод из последовательного порта при загрузке скомпилированной нами U-Boot.
U-Boot SPL 2016.11-rc3-00044-g38cacda-dirty (14 ноября 2016 г. - 13:02:35) ########################### ##### Технологии MSYS #### ##### Мы были здесь #### ########################### Пытаюсь загрузиться с MMC1 чтение uboot.env ** Невозможно прочитать "uboot.env" из mmc0: 1 ** Использование среды по умолчанию чтение u-boot.img чтение u-boot.img чтение u-boot.img чтение u-boot.img U-Boot 2016.11-rc3-00044-g38cacda-dirty (14 ноября 2016 г. - 13:02:35 +0530) Процессор: AM335X-GP rev 2.0 Модель: TI AM335x BeagleBone Black DRAM: 512 МБ NAND: 0 МБ MMC: OMAP SD / MMC: 0, OMAP SD / MMC: 1 чтение uboot.env ** Невозможно прочитать "uboot.env" из mmc0: 1 ** Использование среды по умолчаниюне установлен. Проверка первого MAC-предохранителя E-fuse Сеть: eth0: ethernet @ 4a100000 Нажмите любую клавишу, чтобы остановить автозагрузку: 0 => =>
Как вы можете ясно видеть, это U-Boot, который мы скомпилировали и загрузили в цель (проверьте строковые технологии MSYS в журнале, вторая строка вывода.
Загрузчик первого этапа проверяет и загружает u -ботинок.