Кран манипулятор TADANO TMZ303
Технические характеристики крана манипулятора, представленного в ООО «КранТракСервис», включают в себя:
| Г/П КРАНА | Грузоподъёмность: 2,93 тонны на 2,6 м (4 ветви), вылет стрелы 7,7 м. |
| СТРЕЛА | Полностью механизированная телескопическая стрела с пятиугольной коробчатой конструкцией |
| Секции | 3 |
| Рабочий радиус | 3,27 м – 7,7 м |
| Скорость выдвижения | 4,43 м / 12 с |
| Диапазон / скорость подъема | 1 — 78 град. / 7,5 с |
| Высота подъема крюка над уровнем земли | 9,2 м |
| Макс. вылет стрелы | 7,7 м |
| Выдвижение стрелы | 2-мя гидроцилиндрами |
| Грузовой момент | 7,62 т/м |
| ЛЕБЕДКА | Гидравлический мотор, редуктор с автоматическим механическим тормозом.  Редуктор с прямозубыми цилиндрическими шестернями. Редуктор с прямозубыми цилиндрическими шестернями. |
| Макс. скорость намотки одинарного троса | 76 м /мин (при намотке троса в 4 слоя) |
| Скорость подъёма крюка | 19,0 м/мин (при намотке троса в 4 слоя с четырехтросовой системой подвески крюка) |
| Крюковой блок | Грузоподъемность 3000 кг, 2-х блочный с предохранительной защелкой |
| Стальной трос (диаметр х длина) | 8 мм х 51 м Конструкция (JIS) lWRC 6 х WS(26) GRADE B Усилие разрыва 42,4кН (4320кгс) |
| ПОВОРОТ | С приводом от гидромотора. Редуктор с червячной передачей. Непрерывный поворот на 360 град. |
| Скорость поворота | 2,5 обор / мин |
| ОПОРЫ (АУТРИГЕРЫ) | Горизонтальное выдвижение аутригеров — вручную |
| Вертикальное выдвижение аутригеров | Гидроцилиндры двойного действия с управляемым клапаном |
| Ширина выдвижения | Макс. : 3,4 м, Ср.: 2,7 м, Мин.: 2,0 м : 3,4 м, Ср.: 2,7 м, Мин.: 2,0 м |
| ГИДРАВЛ. СИСТЕМА | Номинальное давление в гидравлической системе 20,6MPa (210кгс/cм2) |
| Гидравл. насос | Гидравлический насос — шестерёнчатый тип. Номинальная произв-ность 32 л/мин. Номинальная частота вращения 1700 об/мин |
| Гидравл. клапана | Управляющий клапан непрерывного действия с клапаном сброса давления |
| ПОДХО-ДЯЩИЕ ГРУЗОВИКИ | Полная масса автомобиля 7500 — 10000 кг |
| ООО «КранТракСервис / сайт: www.kran-ts.ru / тел. +7(916)551-35-78 | |
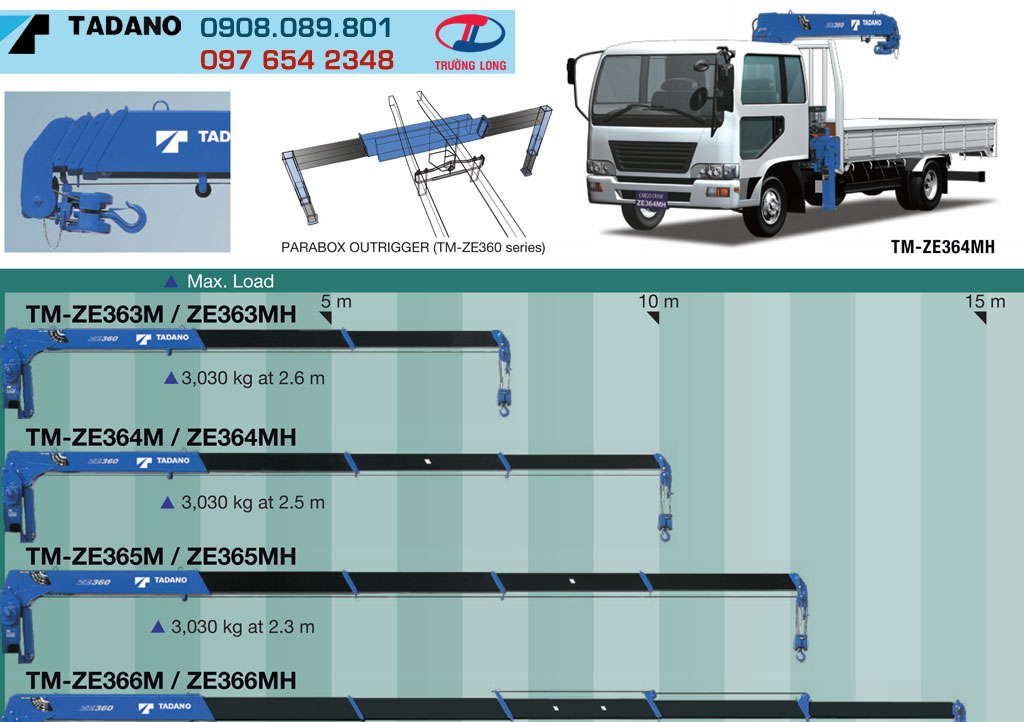
Рабочий диапазон крана манипулятора TADANO TMZ303
Указанные в рабочем диапазоне высоты подъёма и углы наклона стрелы приведены для прямой (не нагруженной) стрелы. Необходимо сделать поправку на отклонение стрелы под нагрузкой.
Расчётные грузоподъёмности крана манипулятора TADANO TMZ303При расчёте грузоподъёмности крана манипулятора необходимо добавлять к массе нагрузке (весу груза) массу крюка (30 кг), канатов (тросов) и всех аналогично используемых грузоподъёмных устройств.
ВНИМАНИЕ
1. Полностью выдвигайте аутригеры и устанавливайте КМУ горизонтально.
2. Таблица рассчитана на основе возможностей КМУ и не учитывает устойчивость автомобиля.
3. Указанные нагрузки необходимо скорректировать в соответствии с весом самого автомобиля, состоянием его загруженности, положением аутригеров, силой ветра, состоянием поверхности и скоростью управления.
4. Из грузоподъёмности необходимо вычесть вес крюка (30кг) и строповочных приспособлений.
5. В связи с постоянным улучшением характеристик КМУ, спецификации могут быть изменены.
Посмотреть другие, пользующиеся высоким спросом модели кранов-манипуляторов, которые можно приобрести у нас — здесь
Краткие характеристики и наличие манипуляторов на складе можно уточнить в разделе:
С примерами, как установить кран манипулятор, можно ознакомиться в разделе:
Варианты применения кранов манипуляторов при различных видах погрузочно-разгрузочных работ представлены в разделе:
Получить консультации по подбору крана манипулятора на свой автомобиль или получить консультацию по установке КМУ можно по телефону:
Аренда манипулятора Tadano Super Z300 на базе Mitsubishi Fuso ➡ СтройСпецТех-52
Оснащенность и технические характеристики
| Грузоподъемность платформы: | 5000 кг |
| Габариты платформы: | 5000x2300x600 мм |
| Длина стрелы: | 10 м |
| Грузоподъёмность стрелы (мин вылет): | 3000 кг |
| Грузоподъёмность стрелы (макс вылет): | 300 кг |
| Тип манипулятора: | Телескопический |
| Модель манипулятора: | Tadano Super Z300 |
| Угол поворота: | 360 град |
| Грузовой момент: | 15 т/м |
| Привод: | Монопривод |
Предлагаем в аренду Манипулятор Tadano Super Z300 грузоподъемностью 5 тонн в Нижнем Новгороде и Нижегородской области, на базе Mitsubishi Fuso. Грузоподъемность стрелы 3 тонны, борт — 5 тонн, кузов — 5 метров.
Грузоподъемность стрелы 3 тонны, борт — 5 тонн, кузов — 5 метров.
Крано-манипуляторная установка Tadano Super Z30 на базе Mitsubishi Fuso сочетает в себе компактность, производительность, функциональность. Предлагаем взять в аренду манипулятор с бортом 5 метров, который оснащается 10-метровой телескопической стрелой. Рабочий орган установки выполнен из высококачественной стали, способен выдерживать нагрузку до 3 тонн (при минимальном вылете).
Ещё спецтехника в аренду:
Манипулятор лидера с функцией упора для рук для микрохирургии
. 2022 апр;18(2):e2355.
doi: 10.1002/rcs.2355. Epub 2021 8 декабря.
Солмон Чон 1 , Котаро Тадано 2
Принадлежности
- 1 Инженерная школа Токийского технологического института, Йокогама-ши, Япония.

- 2 Лаборатория будущих междисциплинарных исследований в области науки и техники, Токийский технологический институт, Йокогама-ши, Япония.

- PMID: 34826367
- PMCID: PMC9286542
- DOI: 10.1002/rcs.2355
Бесплатная статья ЧВК
Солмон Чжон и др. Int J Med Robot. 2022 Апрель
Бесплатная статья ЧВК
. 2022 апр;18(2):e2355.
doi: 10. 1002/rcs.2355.
Epub 2021 8 декабря.
1002/rcs.2355.
Epub 2021 8 декабря.
Авторы
Солмон Чон 1 , Котаро Тадано 2
Принадлежности
- 1 Инженерная школа Токийского технологического института, Йокогама-ши, Япония.
- 2 Лаборатория будущих междисциплинарных исследований в области науки и техники, Токийский технологический институт, Йокогама-ши, Япония.
- PMID: 34826367
- PMCID: PMC9286542
- DOI:
10. 1002/rcs.2355
 1002/rcs.2355
1002/rcs.2355Абстрактный
Задний план: Подставка для руки помогает микрохирургам поддерживать стабильное состояние руки. При манипулировании хирургическим роботом с помощью дистанционного управления внешняя опора для рук создает механические трудности, такие как помехи от манипуляторов.
Методы: Здесь мы представили функцию упора для рук в манипулятор лидера. Функция упора для руки была реализована путем переключения значения импеданса в контроле проводимости для секции перемещения. При дистанционном управлении мы оценили точность позиционирования в направлении силы тяжести и условия манипулирования во время точного позиционирования.
Результаты: Эксперименты показали, что положение упора для рук может быть установлено в предполагаемом положении, а условие с функцией упора для рук, применение достаточно высокого импеданса и отсутствие полного ограничения упора для рук обеспечивало наилучшую производительность.
Заключение: Наш передовой манипулятор продемонстрировал потенциал для улучшения качества роботизированной микрохирургии с преимуществом в тонкой манипуляции, основанной на большом рабочем диапазоне перемещения упора для руки.
Ключевые слова: упор для рук; манипулятор лидера; микрохирургия; роботизированная хирургия; телеоперация.
© 2021 Авторы. Международный журнал медицинской робототехники и компьютерной хирургии, издаваемый John Wiley & Sons Ltd.
Заявление о конфликте интересов
У авторов нет конфликта интересов в отношении данной рукописи.
Цифры
РИСУНОК 1
Обзор руки, держащей…
РИСУНОК 1
Обзор руки, держащей хирургический инструмент
ФИГУРА 1Обзор руки, держащей хирургический инструмент
РИСУНОК 2
Обзор манипулятора лидера…
РИСУНОК 2
Обзор манипулятора выноски, состоящего из (A) перемещения, (B) ориентации и (C)…
ФИГУРА 2 Обзор манипулятора лидера, состоящего из (A) секции перемещения, (B) ориентации и (C) секции захвата. (D) Фотография лидера-манипулятора
(D) Фотография лидера-манипулятора
РИСУНОК 3
Фурнитура захвата…
РИСУНОК 3
Фурнитура секции захвата
РИСУНОК 3Фурнитура секции захвата
РИСУНОК 4
Система управления переводом…
РИСУНОК 4
Система управления секции перевода для функции упора для рук: f ext ,…
РИСУНОК 4Система управления секции перевода для функции упора для рук: fext, внешнее усилие; J — матрица Якоби трансляционного сечения; Zon,Zoff, значение импеданса в каждом режиме; x˙on,x˙off, эталонная скорость в каждом режиме
РИСУНОК 5
Обзор управления рукой…
РИСУНОК 5
Обзор управления функцией упора для рук
РИСУНОК 5Обзор управления функцией подставки для рук
РИСУНОК 6
Обзор оценки…
РИСУНОК 6
Обзор оценки точности позиционирования: (A) лидерная часть; (B) деталь толкателя
РИСУНОК 6Обзор оценки точности позиционирования: (A) лидерная часть; (B) деталь толкателя
РИСУНОК 7
Результаты оценочного эксперимента…
РИСУНОК 7
Результаты оценочного эксперимента (максимальная ошибка)
РИСУНОК 7Результаты оценочного эксперимента (максимальная ошибка)
РИСУНОК 8
Следящий манипулятор в манипуляторе…
РИСУНОК 8
Следящий манипулятор в эксперименте по наведению: (A) Обзор следящей части; (Б)…
РИСУНОК 8Следящий манипулятор в эксперименте по наведению: (A) Обзор следящей части; (B) кончик следящего манипулятора и (C) экспериментальная цель
РИСУНОК 9
Экспериментальная мишень наведения…
РИСУНОК 9
Экспериментальная мишень эксперимента по наведению
РИСУНОК 9Экспериментальная цель эксперимента по наведению
РИСУНОК 10
Обзор передней части…
РИСУНОК 10
Обзор ведущей части эксперимента по наведению
РИСУНОК 10Обзор ведущей части эксперимента по наведению
РИСУНОК 11
Контактная информация между наконечником…
РИСУНОК 11
Контактная информация между наконечником следящего манипулятора и целями: (A)…
РИСУНОК 11Контактная информация между кончиком манипулятора следящего устройства и целями: (A) контакты с успешной целью и (B) контакты с неудачной целью (один участник, RH)
РИСУНОК 12
Позиционная информация входа…
РИСУНОК 12
Позиционная информация о входном движении в лидере (один участник, RH)
РИСУНОК 12Позиционная информация о входном движении в лидере (один участник, RH)
РИСУНОК 13
Результаты экспериментов по наведению:…
РИСУНОК 13
Результаты экспериментов по наведению: (A) необходимое время, (B) количество отказов, (C)…
РИСУНОК 13Результаты экспериментов по наведению: (A) необходимое время, (B) количество отказов, (C) длина траектории входного движения (D) длина траектории упора руки, (E) соотношение запястья и пальца движение, (F) баллы предпочтения условий в экспериментах по указанию
См. это изображение и информацию об авторских правах в PMC
это изображение и информацию об авторских правах в PMC
Похожие статьи
К роботизированной микрохирургии сосудов сетчатки.
Дженсен П.С., Грейс К.В., Аттаривала Р., Колгейт Дж.Е., Глюксберг М.Р. Дженсен П.С. и др. Graefes Arch Clin Exp Офтальмол. 1997 ноябрь; 235 (11): 696-701. DOI: 10.1007/BF01880668. Graefes Arch Clin Exp Офтальмол. 1997. PMID: 9407227
Hamlyn CRM: компактный главный манипулятор для дистанционного управления хирургическим роботом.
Чжан Д., Лю Дж., Чжан Л., Ян Г.З. Чжан Д. и др. Int J Comput Assist Radiol Surg. 2020 март; 15 (3): 503-514. doi: 10.1007/s11548-019-02112-y. Epub 2020 19 января. Int J Comput Assist Radiol Surg. 2020. PMID: 31956954 Бесплатная статья ЧВК.
Новое мастер-устройство контактного типа с точной манипуляцией для роботизированной микрохирургии.
Kim DS, Yang UJ, Cheon B, Baek D, Kwon DS. Ким Д.С. и др. Int J Med Robot. 2021 дек;17(6):e2314. doi: 10.1002/rcs.2314. Epub 2021 17 августа. Int J Med Robot. 2021. PMID: 34297469
Микрохирургическая роботизированная система для витреоретинальной хирургии.
Ида Ю., Сугита Н., Уэта Т., Тамаки Ю., Танимото К., Мицуиси М. Ида Ю и др. Int J Comput Assist Radiol Surg. 2012 Январь;7(1):27-34. doi: 10.1007/s11548-011-0602-4. Epub 2011 15 мая. Int J Comput Assist Radiol Surg. 2012. PMID: 21573828 Обзор.
Роботизированный микрохирургический пинцет для трансоральной лазерной микрохирургии.
Чаухан М., Дешпанде Н., Паккиротти С., Мели Л., Праттичиццо Д., Колдуэлл Д.Г., Маттос Л.С. Чаухан М. и соавт. Int J Comput Assist Radiol Surg. 2019 февраля; 14 (2): 321-333. doi: 10.1007/s11548-018-1887-3. Epub 2018 21 ноября. Int J Comput Assist Radiol Surg. 2019. PMID: 30465304


Посмотреть все похожие статьи
использованная литература
- Рамачандран С., Ганем А.М., Майерс С.Р. Оценка компетентности в области микрохирургии – где мы сейчас? Микрохирургия. 2013;33(5):406-415. — пабмед
- Ниссенбаум М., Меклер Р., Акланд Р. Положение руки в микрохирургии. J Hand Surg. 1979;4(2):118-120.
—
пабмед
- Ниссенбаум М., Меклер Р., Акланд Р. Положение руки в микрохирургии.
- Коулсон С.Дж., Рид А.П., Проупс Д.В., Бретт П.Н. ЛОР-проблемы в малых масштабах. Int J Med Robot Comput Assist Surg. 2007;3:91-96. — пабмед
- Шитц К.Х., Клафлин Дж., Димик Дж.Б. Тенденции внедрения роботизированной хирургии для обычных хирургических процедур. Сеть JAMA открыта. 2020;3:e1918911. — ЧВК — пабмед
- Кац Р. Д., Россон Г.Д., Тейлор Дж.А., Сингх Н.К. Робототехника в микрохирургии: использование хирургического робота для выполнения свободного лоскута у свиньи. Микросург. 2005;25:566-569.
—
пабмед
- Кац Р.
 J Hand Surg. 1979;4(2):118-120.
—
пабмед
J Hand Surg. 1979;4(2):118-120.
—
пабмед Д., Россон Г.Д., Тейлор Дж.А., Сингх Н.К. Робототехника в микрохирургии: использование хирургического робота для выполнения свободного лоскута у свиньи. Микросург. 2005;25:566-569.
—
пабмед
Д., Россон Г.Д., Тейлор Дж.А., Сингх Н.К. Робототехника в микрохирургии: использование хирургического робота для выполнения свободного лоскута у свиньи. Микросург. 2005;25:566-569.
—
пабмедтермины MeSH
Обработка персональных данных физических лиц в пределах ЕЭЗ
Каждая компания группы Tadano (совместно именуемая «Tadano») должна обрабатывать персональные данные физических лиц в пределах Европейской экономической зоны в соответствии с Общим регламентом ЕС по защите данных (далее «ВВП»). Законодательные поправки или изменения во внутренних процессах нашей компании могут потребовать внесения поправок в это заявление, поэтому, пожалуйста, регулярно читайте это заявление.
«Личные данные» — это информация, которую можно отнести к вам индивидуально. Это включает, например, ваше имя, адрес электронной почты, домашний адрес, пол, дату рождения, номер телефона и возраст. Неперсональные данные — это такая информация, как количество пользователей веб-сайта.
Персональные данные собираются через этот веб-сайт только в том случае, если вы добровольно предоставляете их нам, например. в процессе регистрации, заполнив формы, отправив электронные письма или загрузив документы заявки. Мы используем эти данные для указанных целей и в соответствии с изложенными ниже принципами.
1. Принципы обработки персональных данных
В соответствии со статьей 1 GDPR Tadano обязуется:
- Обрабатывать персональные данные законно, справедливо и прозрачно по отношению к субъекту данных.
- Обрабатывать персональные данные только в объеме, необходимом для достижения заранее указанных целей.
- Хранить персональные данные в течение срока, необходимого для достижения целей.
- Точно хранить персональные данные и поддерживать их в актуальном состоянии в объеме, необходимом для достижения целей.
- Обрабатывать персональные данные, применяя соответствующие технические и организационные меры.

2. Цели обработки персональных данных
Цели обработки персональных данных Tadano:
- Для персональных данных населения и лиц, являющихся контрагентами бизнеса:
(1) Предоставление услуг, таких как продажа, ремонт и проверка продукции Tadano или закупка сырья или аналогичных предметов.
(2) Проведение анкетных опросов и создание статистических материалов и другой информации, связанной с продуктами, услугами и планированием продаж на основе результатов опроса.
(3) Предоставление запрошенных продуктов, услуг и различных материалов.
(4) Ответы на комментарии и запросы, а также рассылка рекламных подарков.
(5) Предоставление информации о продуктах, услугах, мероприятиях, опросах и других вопросах, связанных с Tadano.
(6) Выполнение другой работы, связанной с каждым из вышеперечисленных или полученной отдельно с согласия субъекта данных. - Для личных данных сотрудников Tadano и Tadano Group, а также претендентов на должности в Tadano
1) Участие в управлении работой, благополучии сотрудников, охране здоровья и безопасности
2) Предоставление образования и обучения
3) Связь и уведомления
4) Передача соответствующих персональных данных третьей стороне для любой из целей, описанных в пунктах 1)–3) выше .

3. Законность обработки персональных данных
Tadano обрабатывает персональные данные на основании одного из следующих правовых оснований в соответствии со ст. 6 GDPR:
- Tadano получил согласие субъекта данных.
- Обработка необходима для выполнения обязательств по договору с субъектом данных.
- Обработка необходима Tadano для выполнения своих юридических обязательств.
- Обработка необходима для защиты законных интересов, преследуемых Tadano.

4. Предоставление персональных данных третьему лицу
- В соответствии со статьями 13 и 14 GDPR, если Tadano предоставляет персональные данные, касающиеся субъекта данных, третьему лицу, он должен передать информацию получателя данным субъекта в рамках обработки персональных данных на основании применимого правового основания.
- В соответствии с главой V GDPR, если Tadano передает персональные данные из Европейского Союза в третью страну, она должна применять меры безопасности, требуемые применимыми законами и правилами.
5. Получение персональных данных от третьего лица
Описание и источник персональных данных, которые Tadano получает от третьего лица, указаны следующим образом:
- Персональные данные, которые необходимо получить от третьего лица
1) Основная информация, контактная информация, семейная информация, информация о работе и карьере и другая информация (фотографии) сотрудников поставщиков Tadano и корпоративных клиентов
2) Основная информация, контактная информация, информация о семье, а также информация о работе и карьере сотрудников поставщиков услуг, с которыми работает Tadano, таких как финансовые компании
3) Основная информация, контактная информация, информация о семье, а также информация о работе и карьере сотрудников бизнес-ассоциаций и сертификационных институтов, с которыми Tadano взаимодействует по номеру
. 4) Информация о занятости и заработной плате от сотрудников/кандидатов других европейских компаний группы Tadano. - Источник персональных данных
1) Поставщики и корпоративные клиенты Tadano
2) поставщики услуг, с которыми сотрудничает Tadano, например, финансовые компании
. 3) бизнес-ассоциации и институты сертификации, с которыми Tadano сотрудничает
4) другие европейские компании группы Tadano.
 4) Информация о занятости и заработной плате от сотрудников/кандидатов других европейских компаний группы Tadano.
4) Информация о занятости и заработной плате от сотрудников/кандидатов других европейских компаний группы Tadano.6. Принятие мер в отношении прав субъектов данных
Tadano предпринимает соответствующие действия по запросам субъекта данных на обработку касающихся его персональных данных в соответствии с GDPR:
- Отзыв согласия на обработку ( ст.7)
- Право доступа субъекта данных (статья 15)
- Право на исправление (статья 16)
- Право на стирание (статья 17)
- Право на ограничение обработки (статья 18)
- Право на переносимость данных (статья 20)
- Право возражать против обработки (статья 21)
- Право на подачу жалобы в надзорный орган (статья 77)
7.
