Манипулятор (механизм) | это… Что такое Манипулятор (механизм)?
У этого термина существуют и другие значения, см. Манипулятор.
Робот-манипулятор работает вблизи печи.Манипуля́тор — механизм для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов. Это значение закрепилось за словом с середины XX века, благодаря применению сложных механизмов для манипулирования опасными объектами в атомной промышленности.
Устройство и применение
Основу манипуляторов составляют пространственные механизмы со многими степенями свободы. Манипуляторы выполняют работы в средах, недоступных или опасных для человека (подводные глубины, вакуум, радиоактивная среда и другие агрессивные среды), вспомогательные работы в промышленном производстве. Манипуляторы используются в медицинской технике (например, в протезировании). Манипуляторы изучает теория манипуляторов, которая является разделом теории машин и механизмов. В узком смысле манипулятором называется механическая рука.
Манипуляторы делятся на управляемые человеком и автоматические манипуляторы (роботы-манипуляторы как разновидность роботов). Развитие манипуляторов привело к созданию промышленных роботов. Проектирование механизмов-манипуляторов требует решения таких задач, как создание манёвренности, устойчивости в работе, выбор правильного соотношения полезных и холостых ходов. Иногда требуется проектирование таких систем, в которых оператор чувствует усилие, создаваемое на рабочем органе или на грузозахвате.
Виды
- Манипулятор (в горном деле) — основной механизм буровой каретки, предназначенный для перемещения в призабойном пространстве автоподатчика с перфоратором (бурильной машиной).
- Манипулятор (в металлургии) — машина для выполнения вспомогательных операций, связанных с изменением положения заготовки при обработке металлов давлением. Различаются прокатный и ковочный манипулятор. В кузнечных и прокатных цехах используются подвесные и напольные манипуляторы, которые являются разновидностью кантователей (механизмов для переворачивания (кантовки) изделий).

- Манипулятор (в ядерной технике) — приспособление для работы с радиоактивными веществами, исключающее непосредственный контакт человека с этими веществами.
- Манипуляторами оснащаются гидростаты для ведения океанографических и других работ на глубинах.
- Платформа Гью — Стюарта — разновидность параллельного манипулятора, в которой используется октаэдральная компоновка стоек. Имеет шесть степеней свободы. Применяется в станкостроении, подводных исследованиях, авиационных спасательных операциях на море, летательных тренажёрах, позиционировании спутниковых антенн, в телескопах и в ортопедической хирургии.
- Кран-манипулятор — мобильная грузоподъёмная машина, включающая грузоподъёмный кран стрелового типа, смонтированный на автомобильном шасси и служащий для его загрузки и разгрузки[1].

Примечания
- ↑ Кран-манипулятор. Cловарь по естественным наукам. Глоссарий.ру.
Устройство крана манипулятора
Согласно Правил безопасности ПБ 10-257-98, операторы (машинисты) кранов-манипуляторов должны быть ознакомлены с особенностями устройства и обслуживания крана-манипулятора.
1. Стрела крана манипулятора.
Обеспечивает работу грузозахватного крюка в рабочей зоне. Секции стрелы выдвигаются и складываются посредством работы гидроцилиндров выдвижения стрелы (задвижения).
2. Колонна (башня) крана манипулятора.
Предназначена для установки и поворота стрелового оборудования. Это вертикальная часть краноманипуляторной установки, на которой установлена стрела, лебедка, и гидроцилиндр. Колонна поворачивается поворотным механизмом.
3. Станина (основание) КМУ.
Устанавливается на лонжероны автомобиля сзади кабины водителя. Служит для обеспечения более равномерной нагрузки на лонжероны.
4. Редуктор лебедки крановой установки.
Подъемная лебедка вращает барабан с тросом посредством гидромотора, поднимает и опускает груз с помощью троса.
5. Редуктор поворота гидроманипулятора.
Поворотный механизм поворачивает колонну манипулятора посредством гидромотора.
6. Гидроцилиндр подъема стрелы КМУ.
Поднимает и опускает стрелу крана манипулятора.
7. Гидроцилиндр телескопирования стрелы манипулятора.
Выдвигает и втягивает секции стрелы манипулятора.
8. Аутригеры (выносные опоры) КМУ.
Аутригеры поддерживают кран-манипулятор в устойчивом положении во время работы КМУ.
9. 10. 11. 12. 13. 14. 16. Рычаги управления краном манипулятором.
Рычаг управления наклоном стрелы. Управление гидроцилиндром изменения угла наклона стрелы.
Рычаг телескопирования стрелы.
 Рычаг управляет гидроцилиндром выдвижения стрелы, выдвигая или складывая стрелу крановой установки.
Рычаг управляет гидроцилиндром выдвижения стрелы, выдвигая или складывая стрелу крановой установки.Рычаг поворота. Рычаг управляет механизмом поворота колонны, позволяя установке поворачиваться по часовой или против часовой стрелки на 360 градусов.
Рычаги управления аутригерами. Рычаги управляют вертикальным выдвижением и втягиванием аутригеров (опор) с каждой стороны крана манипулятора.
Рычаг ускорения (акселератор). Рычаг регулирует частоту вращения двигателя по необходимости.
15. Крюк (гак) крановой установки.
16. Трос крана манипулятора.
17. Сигнализация перегрузки КМУ.
Сигнализация оборудована по стандартному типу. Когда крюк приближается к вершине стрелы, включается сигнальный гудок, который предупреждает о перегрузке троса.
18. Индикатор грузоподъемности (манометр) КМУ.
Прибор показывает вес поднимаемого груза.
19. Сигнал опасности (звуковой) КМУ.
При нажатии кнопки предупредительного сигнала, включается сигнал автомобиля. Это предупреждает рабочих и других людей, находящихся в зоне работы гидроманипулятора.
20. Коробка отбора мощности манипулятора.
21. Карданный вал гидронасоса крана манипулятора.
22. Гидравлический насос КМУ.
23. Рукава высокого и низкого давления КМУ.
24. Шкала грузоподъемности (развесовка) КМУ.
Индикатор показывает номинальное значение нагрузки, соответствующее длине выдвинутой стрелы и ее углу наклона.
25. Гидроколлектор КМУ.
Выполняет передачу масла в колонну (башню) крана манипулятора.
26. Опорно-поворотное устройство (ОПУ) КМУ.
ОПУ предназначено для крепления колонны КМУ.
Конструктивно, кран манипулятор представляет собой гидравлический кран, оснащенный полноповоротной телескопической стрелой с тросовой подвеской устройства крепления. Подобные устройства представляют особую ценность для различных строительных площадок, за счет ряда преимуществ и особенных свойств устройства, которые продиктованы уникальностью его конструкции. Возможность аккуратной и четко спроектированной разгрузки, без толчков и ударов при спуске, на заранее подготовленную площадку играет важную роль. Мало какой погрузчик сможет осуществить подъем или спуск груза на площадку за некими препятствиями в виде заборов, стен или любых других конструкций или габаритных предметов. Также легко и непринужденно, манипулятор справится с грузами, которые расположены на уровне ниже самого устройства, например в колодце или какой-либо траншее. Существующая система контроля поднимаемого веса груза, за счет различных датчиков длины стрелы, угла ее наклона, и ряда других указателей, проинформирует о превышении максимально допустимой массы груза.
Гидроманипуляторы могут быть нескольких модификаций, что связано с конструктивными особенностями различных моделей. Стрела крана манипулятора может иметь разные показатели грузоподъемности, количества ступеней и радиус действия крана. С ростом длины стрелы, разумеется, будет сокращаться и ее грузоподъемность. Трос, используемый в крановых установках, является своеобразным расходным материалом, который с течением времени и при частом его использовании, требует замены. Как и любой другой автомобильный кран, манипулятор может быть оснащен дополнительными задними опорами, которые помогают разгрузить раму автомобиля. На качество фиксации крана влияет состояние грунта, а также уровень наклона , что достигает неравномерным выдвижением различных опор. В процессе разгрузки, в зависимости от условий ведения работ, ближние к стреле опоры, могут либо повышать уровень транспортного средства, либо понижать. Так, например, повышение уровня требуется для работы с тяжелыми грузами, во избежания опрокидывании манипулятора.
 В случае работы с грузами, расположенными ниже уровня крана, опоры прячутся, и кран наклоняется, переводя стрелу в наклонное положение.
В случае работы с грузами, расположенными ниже уровня крана, опоры прячутся, и кран наклоняется, переводя стрелу в наклонное положение. С информацией по ремонту кранов манипуляторов можно узнать в разделе:
Получить консультацию можно по телефону:
Что такое роботы-манипуляторы? Обзор типов и приложений
Роботы регулярно используются для перемещения объекта из одного места в другое. Это может быть перемещение тяжелой экструзии из одной области производственного цеха в другую или деликатная операция на человеческом глазу.
Робот-манипулятор или робот-манипулятор является важным устройством в подобных задачах. Используемые для манипулирования материалами и объектами без непосредственного прикосновения человека, манипуляторы могут быть быстрее и точнее, чем люди-операторы, и иногда могут поднимать гораздо более тяжелые веса. Из-за этих важных преимуществ манипуляторы имеют широкий спектр типов и приложений.
В этой статье объясняются основы роботов-манипуляторов: что это такое, как они работают, их различные варианты и некоторые из наиболее полезных приложений в реальном мире.
В области робототехники манипуляторы представляют собой электронные устройства, предназначенные для взаимодействия с окружающей средой путем перемещения объектов из одного места в другое.
Манипуляторы обычно можно считать синонимами роботизированных рук; «манипуляция» описывает задачу, которую выполняют эти устройства, а «роботизированная рука» описывает их структуру, которая может (хотя и не всегда) напоминать человеческую руку. Роботизированная рука содержит различные сегменты, которые взаимодействуют друг с другом посредством скольжения или шарниров, что дает руке несколько степеней свободы (DoF). На крайнем конце руки (кисти, как ее иногда называют) находится концевой эффектор, такой как захват, который отвечает за непосредственное манипулирование объектом.
Манипуляторы могут быть автоматизированы — как в случае со многими задачами на заводе — или управляться оператором, например, во время операций с замочной скважиной в больнице или для подъема груза на складе. Известные роботы-манипуляторы, такие как производства Kuka и ABB, можно считать типами манипуляторов.
Поскольку манипуляторы состоят из нескольких секций, каждая из которых может двигаться по-своему, для управления общим движением руки используются сложные алгоритмы.
Прежде чем мы начнем рассматривать применение манипуляторов, мы классифицируем их по способу кинематической работы.
Руки роботов-манипуляторов обычно имеют от трех до шести степеней свободы, обеспечиваемых серией суставов (аналогично плечевому, локтевому или запястному), которые соединяют различные звенья устройства (аналогично плечу, предплечью или ладонь). Соединения манипулятора обычно представляют собой вращательные или призматические соединения. [1]
[1]
Револьверный шарнир (поворотный шарнир): вращение вокруг одной оси, т. е. вращательное движение
Призматический шарнир (линейный шарнир): поступательное движение вокруг одной оси, т. е. разгибательное движение
Цилиндрический шарнир: вращение и поступательное движение вокруг одной оси
Сферический шарнир (шаровой шарнир): три степени вращения
Тип рычага определяет его число степеней свободы, а также рабочее пространство (насколько далеко оно может простираться).
Различные конфигурации манипуляторов роботов
Робот с шарнирными руками
Шарнирные роботы с шарнирными руками предлагают максимально возможные степени свободы и обычно имеют от трех до шести шарнирных соединений. Самым большим преимуществом робота с шарнирной рукой является его широкий диапазон движений; однако он может быть менее точным, чем другие типы. Общие области применения включают дуговую сварку и окраску распылением.
Общие области применения включают дуговую сварку и окраску распылением.
Робот SCARA
Манипуляторы робота-манипулятора с селективным соответствием (SCARA) имеют один призматический шарнир для перемещения по оси Z и два параллельных вращательных шарнира. Роботы SCARA широко используются при сборке. Они часто могут поднимать более тяжелые грузы, чем другие типы роботов, поскольку два вращающихся шарнира не поднимают.
Декартовский (портальный) робот
Декартовы или портальные манипуляторы могут перемещаться по трем осям по системе рельсов, подобно печатающей головке 3D-принтера для моделирования наплавленным методом (FDM). Их очень легко программировать, и они могут поднимать тяжелые грузы. Обычное использование включает в себя самовывоз и нанесение герметика.
Сферический (полярный) робот
Сферические или полярные роботы-манипуляторы имеют два вращающихся шарнира, в том числе один в основании, и третий призматический шарнир, позволяющий выдвигать руку. Эти манипуляторы требуют менее сложных алгоритмов и полезны для операций сварки и захвата.
Эти манипуляторы требуют менее сложных алгоритмов и полезны для операций сварки и захвата.
Цилиндрический робот
Цилиндрические роботы-манипуляторы имеют вращающееся соединение в основании и два призматических соединения: одно для перемещения по оси Z и одно для перемещения по горизонтальной плоскости. Эта роботизированная система жесткая и точная, но встречается реже, чем другие типы.
Дельта-робот (параллельный)
Дельта-роботы обычно крепятся к потолку рабочей зоны и имеют три или шесть рук, каждая со своим вращающимся или призматическим шарниром. Жесткие и быстродействующие дельта-роботы-манипуляторы используются для таких задач, как захват и установка, сборка и нанесение герметика.
Мы также можем классифицировать манипуляторы по их концевым эффекторам, инструментам на концах рук, которые в конечном итоге определяют, какую операцию может выполнять манипулятор. Концевые эффекторы манипулятора обычно представляют собой некую форму захвата, при этом количество и материал «пальцев» зависят от конечного использования устройства.
Робот-манипулятор с концевыми эффекторами на присосках
Электрические захваты
Электрические захваты имеют пальцы, приводимые в действие отдельными двигателями, что позволяет надежно захватывать объекты, с которыми манипулируют, и высокий уровень контроля над скоростью и размещением.
Пневматический захват
Пневматические захваты используют для движения сжатый воздух, а не электрическую систему, что обеспечивает большее усилие захвата, чем электрические захваты.
Магнитный захват
Магнитные захваты используются для перемещения черных металлов. Магнитность сводит к минимуму риск падения и не требует электричества или воздуха.
Механический захват
Механические захваты не питаются, но имеют штыри или другие конструктивные особенности, которые позволяют им соединяться с объектами, которыми манипулируют.
Присоска
Захваты с присоской используют вакуум для захвата предметов и манипулирования ими.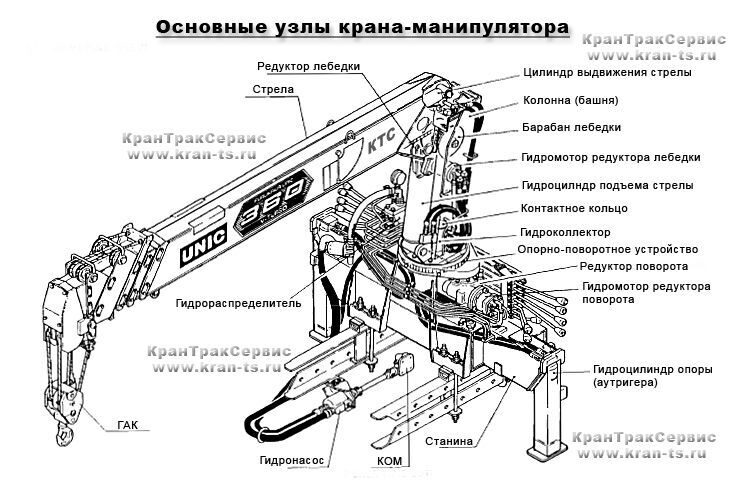 Они представляют собой полезный недорогой вариант, но имеют более ограниченное применение, чем другие типы концевых эффекторов.
Они представляют собой полезный недорогой вариант, но имеют более ограниченное применение, чем другие типы концевых эффекторов.
Роботы-манипуляторы чаще всего используются на промышленных предприятиях. В связи с этим возможности их использования многочисленны и разнообразны. Однако манипуляторов можно найти и за пределами производства, в таких областях, как здравоохранение.
Промышленность
Роботы-манипуляторы широко используются в промышленных условиях благодаря их точности, воспроизводимости, возможностям автоматизации, способности поднимать тяжелые грузы и универсальности с точки зрения различных концевых эффекторов, которые можно использовать. Таких промышленных роботов иногда называют серийными манипуляторами.
Промышленное использование роботов-манипуляторов включает:
Сборка: когда манипулятор используется для добавления различных компонентов в сложную деталь путем прикрепления каждого компонента в правильном месте
- переместить объект из одной области в другую, например. с рабочего стола на поддон
Упаковка: когда манипулятор используется для помещения объекта в коробку, поддон или другую форму упаковки перед, в некоторых случаях, запечатыванием упаковки
Контроль качества: манипуляторы могут использоваться для стресс-тестирования определенных деталей, например, путем их вытягивания или скручивания
Человек- управляемые телеманипуляторы играют важную роль в здравоохранении
Управление роботом может помочь во многих хирургических операциях. Роботизированная хирургия может быть более точной и, следовательно, привести к лучшим результатам для пациентов, чем ручная хирургия.
В большинстве роботизированных операций используются телеманипуляторы, роботизированные манипуляторы, которые позволяют хирургу-человеку управлять рукой и концевым эффектором манипулятора, используя собственные движения рук. Другие роботизированные операции полностью контролируются компьютером, без использования телеманипулятора.
Одним из наиболее ярких примеров роботов-манипуляторов в здравоохранении является хирургическая система Да Винчи, которая используется для хирургических процедур, таких как простатэктомия, гистерэктомия и восстановление сердечного клапана. Система, управляемая с помощью консоли, имеет концевые эффекторы, которые могут функционировать как скальпели, ножницы, электрохирургические устройства или захваты. Одним из ограничений конструкции является отсутствие тактильной обратной связи для оператора.[2]
Космос
Некоторые из наиболее заметных (и дорогостоящих) применений роботов-манипуляторов можно найти в космосе, где имеется ограниченное количество людей-операторов, способных выполнять техническое обслуживание и другие потенциально опасные задачи.
Одним из примеров космического манипулятора является Canadarm. Огромный манипулятор Canadarm весом 450 кг был разработан для манипулирования полезными нагрузками на космических челноках НАСА.
Вместо того, чтобы использовать когтеобразный концевой эффектор, космический робот использовал трехпроводную систему, вдохновленную эластичными лентами.Рекомендуем прочитать: Рука лунного вездехода расширяет функциональные возможности космических миссий
Роботизированные манипуляторы являются одними из наиболее важных устройств в современном производстве, и их использование позволяет создавать эффективные автоматизированные сборочные линии в таких областях, как автомобилестроение, судостроение и производство потребительских товаров. товары. Однако они также используются в других областях, и их использование в будущем будет только увеличиваться благодаря их точности, эффективности и способности достигать труднодоступных мест.
Важнейшей отличительной чертой манипулятора является кинематическое движение его руки, другими словами, конструкция его различных звеньев и шарниров. Тип руки во многом определяет пригодность манипулятора для решения той или иной задачи (поскольку концевые эффекторы более универсальны и взаимозаменяемы).
Например, роботы-манипуляторы SCARA широко используются для захвата и перемещения грузов, а портальные роботы-манипуляторы отлично подходят для подъема тяжелых грузов.[1] Льюис, Ф.Л., Доусон, Д.М., Абдалла, Коннектикут. Управление роботом-манипулятором: теория и практика. КПР Пресс; 2003 12 декабря
[2] Freschi C, Ferrari V, Melfi F, Ferrari M, Mosca F, Cuschieri A. Технический обзор хирургического телеманипулятора да Винчи. Международный журнал медицинской робототехники и компьютерной хирургии. 2013 г., декабрь 9(4):396-406.
Что такое робот-манипулятор? by Robotic Automation Systems
Промышленные роботы произвели революцию в производственном процессе во многих отраслях. Первоначально представленные для работы в недоступных местах и работы с радиоактивными или биологически опасными материалами, роботы теперь используются в различных приложениях автоматизации, включая сварку, сборку, роботизированную хирургию, задачи по сборке и перемещению, литье пластмасс под давлением и многое другое.
Если вы ищете подходящего промышленного робота для производства пластмасс, вам будет полезно разобраться в различных компонентах машины. Одним из наиболее важных из них является робот-манипулятор.
Что такое робот-манипулятор?
Рукообразная структура промышленного робота известна как робот-манипулятор. Этот компонент отвечает за выполнение задач, на выполнение которых запрограммирован робот. Манипулятор, также известный как рука робота, крепится к корпусу робота и состоит из множества звеньев и соединений.
Звенья — это жесткие компоненты, соединяющие различные части манипулятора робота. Их жесткость обеспечивает прочную конструкцию, но для гибкости необходимы соединения. Как и в случае с человеческим телом, роботизированные суставы двигаются по-разному, облегчая линейные, вращательные и вращательные движения. Это позволяет роботу выполнять желаемые движения в пределах своей рабочей зоны.
Различные типы роботов-манипуляторов
Типы и количество соединений робота-манипулятора определяют степень его движения, форму рабочей зоны и возможные области применения.
Вот взгляд на наиболее распространенные типы роботов-манипуляторов, используемых сегодня:- Портальные или декартовы роботы-манипуляторы монтируются над головой и имеют три призматических шарнира, которые обеспечивают линейное скользящее движение. Они классифицируются как 3-осевые роботы и имеют большие прямоугольные или кубические рабочие зоны.
- Цилиндрические роботы-манипуляторы названы в честь формы их рабочей оболочки. Они включают в себя линейные шарниры, соединенные с поворотным основанием, облегчающим перемещение по вертикальной оси. Эта установка позволяет манипулятору удлиняться и втягиваться в любом месте в пределах 360 градусов.
- Манипуляторы робота-манипулятора Selective Compliant Assembly (SCARA) имеют вращающиеся шарниры и перемещаются по осям X/Y, оставаясь при этом неподвижными по оси Z. В результате получается широкий полукруглый рабочий конверт. Роботы-манипуляторы SCARA классифицируются как 4-осевые роботы.
- Роботы-манипуляторы Polar имеют комбинацию поворотных и линейных шарниров, прикрепленных к основанию с помощью вращательного шарнира. Это обеспечивает круговые движения, которые позволяют руке перемещаться в пределах трех осей для сферической рабочей зоны.
- Шарнирные роботы-манипуляторы представляют собой наиболее гибкую конфигурацию промышленных роботов. Рука соединяется с основанием через вращающееся соединение, а звенья внутри руки соединяются с помощью вращающихся соединений, что позволяет руке вращаться, наклоняться и рыскать. Эти манипуляторы классифицируются как 6-осевые роботы.
Теперь, когда вы знаете больше о роботах-манипуляторах, вы можете лучше понять, какой тип вам нужен для вашего бизнеса по литью пластмасс под давлением. Обратитесь к Robotic Automation Systems за полным ассортиментом промышленных роботов от ведущих современных производителей. Наше предприятие расположено недалеко от Мэдисона, штат Висконсин, что позволяет нам обслуживать предприятия по всей стране.
 с рабочего стола на поддон
с рабочего стола на поддон
 Вместо того, чтобы использовать когтеобразный концевой эффектор, космический робот использовал трехпроводную систему, вдохновленную эластичными лентами.
Вместо того, чтобы использовать когтеобразный концевой эффектор, космический робот использовал трехпроводную систему, вдохновленную эластичными лентами. Например, роботы-манипуляторы SCARA широко используются для захвата и перемещения грузов, а портальные роботы-манипуляторы отлично подходят для подъема тяжелых грузов.
Например, роботы-манипуляторы SCARA широко используются для захвата и перемещения грузов, а портальные роботы-манипуляторы отлично подходят для подъема тяжелых грузов.
 Вот взгляд на наиболее распространенные типы роботов-манипуляторов, используемых сегодня:
Вот взгляд на наиболее распространенные типы роботов-манипуляторов, используемых сегодня:
