Лекция 1. Автоматизированное рабочее место: определение, основные принципы построения.
05.Программа учебной дисциплины > 2 Глава. Автоматизированные рабочие места. >
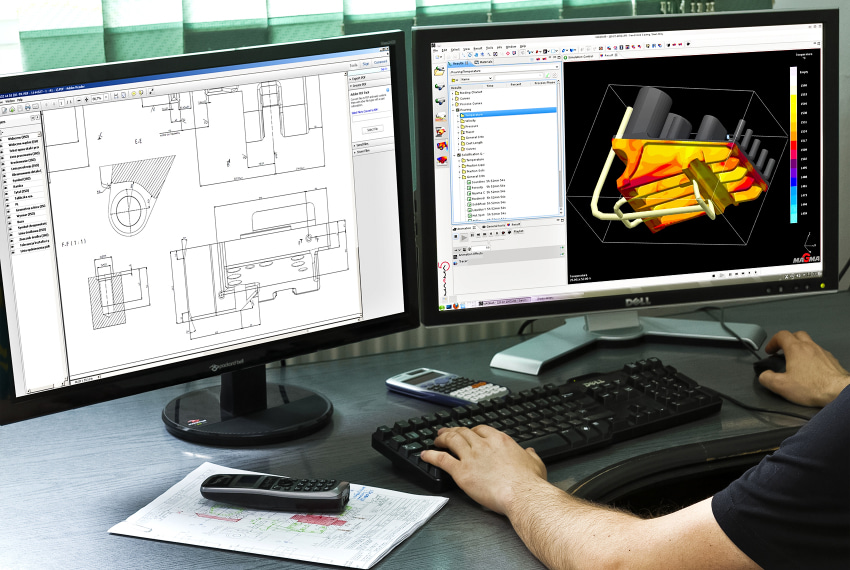
Возрастающие темпы информатизации общества повышают значение вычислительной техники в управленческих процессах. Использование возможностей современной вычислительной техники для автоматизации процесса обработки информации позволяет увеличит производительность труда, повысить эффективность работы с документами и ускорить обмен управленческой информацией. В
настоящее время большое распространение получила концепция распределенных
автоматизированных систем управления, направо ленных на локальную обработку
информации. Это позволяет организовать разделение труда управленческого
персонала и автоматизировать выполнение им своих функций. Для реализации данной
идеи необходимо создание для каждого уровня управления и каждой предметной
области автоматизированных рабочих мест на базе персональных
электронно-вычислительных машин (ПЭВМ). Автоматизированное рабочее место (АРМ) — комплекс среди вычислительной техники и программного обеспечения, располагающийся, непосредственно на рабочем месте сотрудника и предназначенный для автоматизации его работы в рамках специальности. Автоматизированные рабочие места должны создаваться строго в соответствии с их предполагаемым функциональным назначением. Однако общие принципы создания АРМ остаются неизменными, к ним относят: · системность; · гибкость; · устойчивость; · эффективность. Под принципом системности понимается следующее: автоматизированное рабочее место должно представлять собой систему взаимосвязанных компонентов. При этом структура АРМ должна четко соответствовать тем функциям, для выполнения которых создается данное автоматизированное рабочее место. Принцип
гибкости имеет огромное значение при создании современных и эффективно
работающих автоматизированных рабочих мест. Данный принцип означает возможность
приспособления АРМ к предполагаемой модернизации как программного обеспечения,
так и технических средств. Для обеспечения принципа гибкости в реально работающих автоматизированных рабочих местах все подсистемы отдельно взятого АРМ выполняются в виде отдельных, легко заменяемых модулей. Чтобы при замене не возникало проблем несовместимости, все элементы должны быть стандартизированы. Большое значение имеет принцип устойчивости. Он заключается в выполнении заложенных в АРМ функций, независимо от воздействия как внутренних, так и внешних факторов. При возникновении сбоев работоспособность системы должна быстро восстанавливаться, неполадки отдельных элементов должны легко устраняться. Принцип
эффективности подразумевает, что затраты на создание и эксплуатацию системы не
должны превышать экономическую выгоду от ее реализации. Кроме того, при
создании АРМ надо учитывать, что его эффективность будет во многом определяться правильным распределением функций и нагрузки между работником и машинными
средствами обработки информации, ядром которых является ПЭВМ. Практический опыт использования АРМ как одного из элементов Распределенных систем управления позволяет выделить следующие требования к эффективно и полноценно функционирующему автоматизированному рабочему месту: · своевременное удовлетворение информационных потребности пользователя; · минимальное время ответа на запросы пользователя; · адаптация к уровню подготовки пользователя и специфике выполняемых им функций; · возможность быстрого обучения пользователя основным приемам работы; · надежность и простота обслуживания; · дружественный интерфейс; · возможность работы в составе вычислительной сети. Рассмотрим структуру автоматизированного рабочего места и связи между его составными частями. Как
показано на схеме, АРМ состоит из технических и программных средств
вычислительной техники, а также необходимой методик ческой документации, позволяющей
пользователю эффективно взаимодействовать с данными средствами. |


 Только при
соблюдении этих условий АРМ становится средством повышения не только
производительности труда и эффективности управления, но и социальной
комфортности специалистов.
Только при
соблюдении этих условий АРМ становится средством повышения не только
производительности труда и эффективности управления, но и социальной
комфортности специалистов.
Противорадиолокационная ракета Standard-ARM (AGM-78) | Ракетная техника
- Ракетная техника
- Каталог
- Противорадиолокационная ракета Standard-ARM (AGM-78)
Противорадиолокационная ракета «Standard-ARM» (AGM-78) предназначена для поражения радиотехнических средств, и прежде всего радиолокационных станций ЗРК и зенитной артиллерии. Ее разработку. в 1966 году начала фирма «Дженерал дайнэмикс» с целью замены противорадиолокационной ракеты «Shrike», существенными недостатками которой были использование предварительно настраиваемой ГСН и невозможность самонаведения на РЛС, прекратившую работать.
В 1968 году «Standard-ARM» была принята на вооружение ВВС и ВМС США и применялась на самолетах F-105F, А-6А и F-4Е). Кроме того, ею оснащены вооруженные силы Израиля и Республики Корея.
Состав:
Ракета «Standard-ARM» разработана на базе ЗУР «Standard-1» RIM-66A и имеет такие же аэродинамическую и конструктивную схемы. Ракета оснащена двухрежимным твердотопливным двигателем Mk.27 мод.4 весом 360кг. Горючая смесь из полибутадиена и полиуретана, окислитель — перхлорат аммония.
Ракета оснащена двухрежимным твердотопливным двигателем Mk.27 мод.4 весом 360кг. Горючая смесь из полибутадиена и полиуретана, окислитель — перхлорат аммония.
В ней используется метод пассивной радиолокации. В связи с этим было создано несколько вариантов пассивной широкополосной радиолокационной головки самонаведения с разными рабочими диапазонами частот. В ГСН ракеты есть аппаратура, позволяющая запоминать координаты цели, благодаря чему ее наведение может продолжаться даже после выключения излучения РЛС. Специально разработанные радиопрозрачные обтекатели (CW-1106/D) обеспечивают пропускание сигналов практически от всех радиолокационных станций в пределах рабочего диапазона ГСН. Они изготовляются из материала с кристаллической структурой. Применение обтекателей с различной полосой пропускания позволяет осуществлять определенную селекцию радиолокационных сигналов.
Ракета оснащена мощной осколочно-фугасной боевой частью (масса около 150 кг), подрыв которой производится на высоте 15 — 20 м над целью.
Были созданы следующие модификации ракеты «Standard-ARM» : AGM-78A (мод. 1-3), AGM-78B (мод. 1-3), AGM-78C (мод. 1-3) и AGM-78D (мод. 1 и 2).
Они имеют некоторые конструктивные особенности и различные рабочие диапазоны частот ГСН. Так, на ракете AGM-78B мод.1 установлен обтекатель CW-1071 (из пластического материала), пропускающий радиолокационные сигналы довольно широкого спектра, а на AGM-78B мод.2 используется обтекатель CW-1070D (из керамического материала), обеспечивающий поражение только специальных РЛС.
Характеристики:
| Двигательная установка | одноступенчатая схема, ТТРД |
| Длина, м | 4,41 |
| Диаметр, м | 34,3 |
| Вес, кг | 630 |
| Размах крыльев, м | 1,08 |
| Дальность пуска, км | 75 |
| Максимальная скорость, м/с | 820 |
| Система наведения | Пассивное радиолокационное самонаведение |
| Боевая часть | Осколочно-фугасная |
| Вес БЧ, кг | 150 |
| Принятие на вооружение | 1968 |
Испытания и эксплуатация:
Противорадиолокационные ракеты (ПРР) «Standard-ARM» применялись в войне во Вьетнаме, а также в ходе военных действий Израиля против арабских стран.
В 1976 году производство ракет «Standard-ARM» было прекращено. Всего ВВС и ВМФ США было поставлено около 3000 ракет. Прекращение производства ракет было связано с большой стоимостью ракеты — почти в три раза выше, чем у ракеты «Shrike».
К другим недостаткам ракеты относятся сравнительно небольшая скорость полета, что дает возможность противнику принять контмеры по срвыу атаки, а также отсутствие головок самонаведения, обеспечивающих перекрытие достаточно широкого диапазона частот.
Источники:
- Зенитные ракетные комплексы ПВО СВ. Техника и вооружения №5-6.99
Классификация:
Дальность:
75 км.
Год разработки:
1968
Аналоги по назначению и базированию:
Плавание на спине – Техника и движения рук
При плавании на спине руки выполняют противоположные чередующиеся движения.
В то время как одна рука выносится вперед от бедра над водой, другая рука тянется назад спереди к бедру под водой, создавая толчок.
В следующей статье мы более подробно рассмотрим технику гребка руками на спине.
В плавании на спине используются попеременные движения рук, требующие хорошей координации.Видео: Удар на спине Райана Лохте
Во-первых, давайте посмотрим видео с участием Райана Лохте в плавании на спине:
Посмотрите это видео на YouTube
Фазы гребка руками фазы:
- Вход и расширение вперед.
- Первая развертка вниз.
- Фиксатор.
- Первый подъем.
- Второй развертки вниз.
- Второй подъем.
- Выпуск.
- Восстановление.
Эти этапы описаны ниже.
Вход и разгибание вперед
Чтобы начать обсуждение фаз гребка рукой, мы сосредоточимся на руке, которая вот-вот завершит восстановление.
Рука полностью выпрямлена, ладонь обращена наружу.
В воду входит плечо, затем локоть, предплечье и кисть.
Рука входит в воду перед плечом и мизинцем вперед.
Рука вытягивается вперед на короткое время перед началом первого маха вниз.
Вход должен быть плавным, чтобы вода не толкалась рукой вниз и вперед, что может увеличить сопротивление.
Первый мах вниз
Первый мах вниз не является движущим и подготавливает руку к захвату.
Рука движется вниз и наружу.
Локоть постепенно сгибается.
Ладонь и предплечье удерживаются на одной линии и перемещаются в положение, обращенное назад и наружу.
Ловля
Ловля — это фаза гребка руками, когда пловец начинает прилагать тяговое усилие.
Ловля происходит в конце первого маха вниз, когда рука согнута примерно на 90°, а предплечье и ладонь обращены наружу и назад.
Плечо, предплечье и кисть сохранят свое относительное положение в течение следующих двух фаз гребкового цикла и будут двигаться как одна большая лопатка.
Первый подъем вверх
При плавании на спине первый подъем вверх является первой пропульсивной фазой гребка руками.
Во время этой фазы вся рука движется назад, вверх и внутрь как единое целое.
Рука также поворачивается так, что предплечье и ладонь изменяются из положения, обращенного назад, вниз и наружу, в положение, обращенное назад, вверх и внутрь.
Первый подсечка заканчивается, когда рука оказывается у поверхности воды и на уровне плеча.
Плечо и предплечье по-прежнему согнуты под углом 90°, а плечо находится на определенном расстоянии от грудной клетки.
Второй мах вниз
Второй мах вниз — это вторая пропульсивная фаза гребка рукой.
Рука вытягивается и движется вниз, назад и наружу.
Рука перемещается из положения, близкого к поверхности в конце первого взмаха, в положение намного глубже и дальше от тела.
Предплечье обращено назад в начале подсечки и направлено вниз и наружу в конце подсечки.
Таким образом, предплечье толкает воду назад только в начале подсечки.
Запястье сгибается во время подсечки, поэтому ладонь обращена назад, а рука отталкивает воду назад как можно дольше.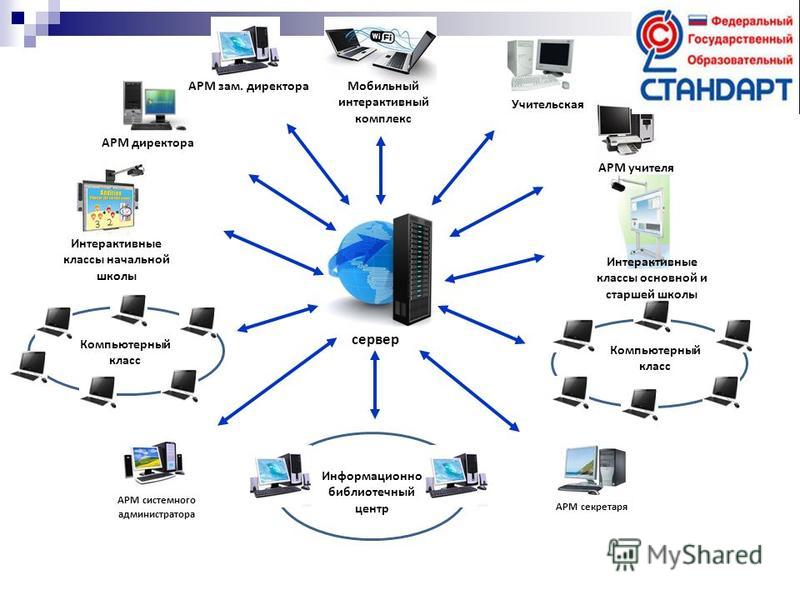
В конце подсечки рука должна быть вытянута, а ладонь обращена вниз и наружу.
Второй гребок вверх
В зависимости от стиля пловца в конце второго гребка вниз может быть добавлена третья пропульсивная фаза.
Для этого ладонь поворачивается вверх и назад, а рука движется вверх, назад и внутрь к бедру, выталкивая воду назад и вверх.
Наконец, ладонь поворачивается внутрь, чтобы подготовиться к выпуску.
Пловцы, которые не добавляют третью пропульсивную фазу, двигают рукой прямо вверх к бедру и поворачивают ладонь внутрь, не отталкиваясь от воды.
Высвобождение
Самый распространенный способ высвобождения — большой палец направлен вверх, а ладонь повернута внутрь.
Во время расцепления нельзя применять чрезмерную силу. В противном случае вода будет без необходимости выталкиваться вверх, увеличивая сопротивление.
Если вы внимательно посмотрите видео Райана Лохте выше, вы увидите, что его ладонь смотрит вниз и вперед, а не внутрь во время подъема и отпускания.
Вероятно, это своего рода небольшой импульсный второй подъем, но он также добавляет некоторое сопротивление при выходе.
Во время выпуска плечо восстанавливающейся руки отводится вперед и вверх, и рука выходит из воды сначала плечом, затем следуют плечо, предплечье и кисть.
Этому способствует то, что тело перекатилось на другую руку, а плечо выходящей из воды руки уже близко к поверхности воды.
Восстановление над водой
Восстанавливающая рука движется по полукругу от бедра в положение, направленное вверх, в положение над головой, где она снова входит в воду.
Во время подъема рука поворачивается так, что ладонь перемещается из положения, обращенного внутрь в начале подъема, в положение, обращенное наружу в конце восстановления, прежде чем войти в воду мизинцем вперед.
Во время восстановления рука должна быть вытянута, но не слишком расслаблена и не слишком напряжена. Он должен двигаться вперед, используя инерцию выхода, но также немного отдыхать после пропульсивных подводных фаз.
Синхронизация рук
- Руки двигаются поочередно.
- Пока одна рука восстанавливается над водой, другая рука движется назад под водой.
- Гладящая рука покидает воду и становится восстанавливающей рукой во время первого опускания другой руки.
- Первая половина восстановления продолжается во время первого опускания и первого взмаха другой гребущей рукой.
- Вторая половина восстановления происходит во время второго опускания гребущей руки.
- Восстанавливающая рука входит в воду в конце второго взмаха гребущей руки.
- Восстанавливающая рука вытягивается вперед под водой во время второго взмаха гребущей руки.
Дополнительные советы
1) Как объяснялось выше, тело перекатывается в сторону восстанавливающей руки во время второй фазы восстановления.
Перекатывание из стороны в сторону перемещает руку в более удобное исходное положение для подметания под водой.
В этом положении легче задействовать мышцы груди и спины, меньше напрягаются плечи.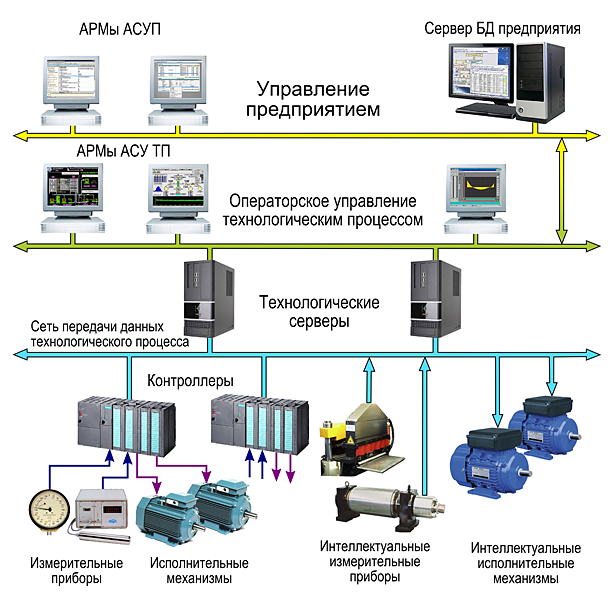
2) Хотя тело перекатывается из стороны в сторону при плавании на спине, голова сохраняет нейтральное положение, затылок находится в воде, а лицо обращено к потолку.
Связанные страницы
Вас также могут заинтересовать следующие статьи, посвященные технике плавания на спине:
Движение рук на скорость — Западная Шотландия Информация для тренировок и тренировок
упускается из виду, роль в спринте и развитии скорости. Без специального и регулярного обращения к правильной механике рук в рамках вашей программы тренировок на скорость потенциал полной скорости не будет реализован. Сегодня мы решим эту проблему, чтобы мы могли продолжать улучшать спортивную площадку. Роль рук заключается в стабилизации туловища, чтобы сила могла эффективно передаваться через бедра. Именно эта способность эффективно передавать мощность через центр масс не только улучшает скорость ускорения, но и облегчает достижение максимальной скорости, поддержание этих максимальных скоростей и снижение скорости замедления. Итак, как видите, руки прямо и косвенно влияют на способность быстро бегать. Теперь давайте углубимся в особенности улучшения работы рук. Во время бега очень важно держать руки расслабленными. Представьте, что вы держите в каждой руке по картофельной стружке. Как бы сильно ты ни бегал, как бы ни уставал, ты не сможешь сжать руки так, чтобы чипсы сломались. Это хороший способ подумать о том, насколько свободными должны быть ваши руки во время бега. Когда вы начинаете крепко сжимать кулаки, это сжатие распространяется по предплечьям, бицепсам, плечам, шее и лицу. Как только вы напрягаетесь и теряете диапазон движений в руках, это уменьшает длину шага, которую трудно восстановить, не сжигая много энергии. Во время спринта важно использовать полный диапазон движений рук. Помните, что скорость — это произведение длины и частоты шагов. Длина и частота шагов определяются, в частности, движением рук. Если вы ленивы или пассивны в движениях рук, вы ограничиваете свой потенциал скорости. Угол наклона передней руки должен быть в пределах 60-90 градусов в локте, а задней руки должен быть в пределах 90-120 градусов, также в локте. Если угол наклона ваших рук выходит за пределы этого диапазона, это отрицательно скажется на вашей беговой механике. Короче говоря, вы будете бегать медленнее и быстрее уставать. При беге махи руками следует начинать с плеч и через них. Вы должны думать о своем локте как о запертом на месте. Угол изгиба локтя должен измениться лишь незначительно в результате упругой реакции. Диапазон движения руками обычно должен быть от бедра до щеки. То есть рука очищает бедро сзади и поднимается примерно на высоту щеки спереди. Гораздо больше, чем это, в любом направлении, приведет к чрезмерному шагу, который, как упоминалось ранее, приведет к поломке и может привести к напряжениям, натяжениям и разрывам мышц. При беге упор должен делаться на отведение локтей вниз и назад. Когда бегуны отводят руки прямо назад, не опуская их сначала вниз, это часто приводит к тому, что плечи сгибаются, что вызывает скованность и ограничивает диапазон движения. Другим аспектом действия рук является предотвращение бокового отклонения за пределы сагиттальной плоскости. Это означает, что ваши руки, когда они вынесены перед собой, никогда не должны пересекать среднюю линию вашего тела. Ваша правая рука должна оставаться на правой половине вашего тела, а левая рука должна оставаться на левой стороне. Когда вы двигаете руками поперек средней линии тела, вы вращаете бедрами, что в основном сжигает столь необходимую энергию и заставляет вас бегать медленнее и быстрее уставать, и все это только из-за лени и отсутствия концентрации. Помните, вы соревнуетесь так же, как и тренируетесь, поэтому, если вы не исправите технические проблемы на практике, вы не можете ожидать, что они будут исправлены на соревнованиях. ПРИМЕР УПРАЖНЕНИЯ Это упражнение можно выполнять как в группе, так и в одиночестве, стоя перед зеркалом. About the author |


 Важно сосредоточиться на отведении рук назад, поскольку они эластично восстанавливаются за счет растяжения мышц плеча. Итак, не двигайте руками вверх и вперед, потому что рефлекс растяжения все равно выдвинет их вперед.
Важно сосредоточиться на отведении рук назад, поскольку они эластично восстанавливаются за счет растяжения мышц плеча. Итак, не двигайте руками вверх и вперед, потому что рефлекс растяжения все равно выдвинет их вперед.