Многоцелевой тягач легкий бронированный МТЛБ
МТЛБ – это быстроходный вездеход, предназначенный для доставки людей и транспортировки грузов в закрытом отапливаемом кузове в условиях бездорожья, снежных заносов, топкого грунта.
МТЛБ был разработан в 1964 году конструкторским бюро Харьковского тракторного завода под руководством А. Ф. Белоусова. Серийное производство машины началось в 1966 году.
В передней части корпуса машины размещены агрегаты трансмиссии, далее следует отделение управления с местами экипажа. Двигатель расположен в средней части ближе к левому борту, за счет чего образуется проход у правого борта. Задняя часть корпуса служит десантным отделением или грузовой платформой.
Герметичный корпус машины — сварной конструкции из катаных броневых листов толщиной 7 — 14 мм. Это обеспечивает защиту экипажа и десанта от пуль ручного огнестрельного оружия и осколков артиллерийских снарядов и мин малого калибра.
В отделении управления слева располагается механик-водитель, справа — командир машины.
Вращающаяся коническая башня с 7,62-мм пулеметом ПКТ расположена в правой части крыши отделения управления — над местом командира. Левее башни находится командирский люк, еще левее — люк механика-водителя.
Тактико-технические характеристики | МТЛБ |
Масса заправленного тягача без груза и экипажа, кг | 9,700 |
| Грузоподъемность, кг: |
|
номинальная, при буксировке прицепов | 2,000 |
максимальная, при перевозке грузов без прицепа | 2,500 |
Масса буксируемого прицепа, кг | 6,500 |
Количество посадочных мест: |
|
в кабине | 2 |
в кузове | 11 |
Габаритные размеры, мм |
|
длина | 6,454 |
ширина (по гусенице) | 2,850 |
высота (при клиренсе 400 мм) | 1,865 |
Колея, мм | 2,500 |
База, мм | 3,700 |
Дорожный просвет, мм | 395-415 |
Максимальная скорость, км/час | 61. |
Средний расход топлива с грузом на платформе и прицепом, кг |
|
на час работы двигателя | 43-44 |
на 100 км пути | 90-120 |
Топливо | Дизель |
Двигатель | ЯМЗ-238 |
Число цилиндров | 8 |
Рабочий объём, л | 14.86 |
240 | |
Номинальное число оборотов, об/мин | 2100 |

 youtube.com/embed/fWxqp9FKUk8″ frameborder=»0″ allowfullscreen=»»>
youtube.com/embed/fWxqp9FKUk8″ frameborder=»0″ allowfullscreen=»»> Позади отделения управления, в средней части корпуса, в шумопоглощающих перегородках установлен многотопливный 8-цилиндровый четырехтактный V-образный дизельный двигатель ЯМЗ-238В и обслуживающие его системы. Максимальная мощность двигателя — 240 л.с, что обеспечивает весьма высокий для 1960-х годов показатель удельной мощности — 26 л.с./т.
Радиатор системы охлаждения находится здесь же в моторном отделении, а поток охлаждающего воздуха, поступающего снаружи, регулируется с помощью жалюзи в левой стенке корпуса. Для облегчения запуска в холодное время двигатель снабжен специальным устройством, обеспечивающим подогрев жидкости в системе охлаждения и масла в картере.
Мощность от двигателя к трансмиссии, расположенной в передней части корпуса, передается через карданный вал, проходящий между сиденьями механика и командира. Коробка передач имеет шесть передач переднего хода и одну — заднего. Двухпоточный механизм поворота обеспечивает два фиксированных радиуса разворота на каждой передаче; управление осуществляется механиком-водителем с помощью двух рычагов.
Ходовая часть транспортера состоит из 12 опорных катков, двух ведущих колес, двух направляющих колес заднего расположения и двух гусениц. На передних и задних узлах подвески установлены телескопические гидроамортизаторы и ограничители хода балансиров. Опорные катки — из алюминиевого сплава. Ведущие колеса в передней части корпуса имеют съемные зубчатые венцы, что облегчает их замену при чрезмерном износе. Механизм натяжения гусениц размещен внутри корпуса, регулировка натяжения также осуществляется изнутри машины.
Гусеница — стальная, мелкозвенчатая, с открытым шарниром. На поздних модификациях могла устанавливаться гусеница с закрытым резинометаллическим шарниром (РМШ), срок её службы — в 2,5 — 3 раза выше. Ширина гусеничных траков — 350 мм.
При движении по шоссе МТЛБ развивает скорость до 61 км/ч. Он может преодолевать подъём до 35°, вертикальную стенку высотой 0,61 м, ров шириной 2,41 м. Большим преимуществом МТ-ЛБ является его способность вплавь преодолевать водные преграды со скоростью 6 км/ч. Движение при этом обеспечивается за счет перемотки гусениц. Чтобы встречный поток воды не заливал машину, на плаву поднимается волноотражательный щит, кроме того, присоединяются квоздухопитающей трубе удлинитель, к выхлопной — защита выхлопа.
Движение при этом обеспечивается за счет перемотки гусениц. Чтобы встречный поток воды не заливал машину, на плаву поднимается волноотражательный щит, кроме того, присоединяются квоздухопитающей трубе удлинитель, к выхлопной — защита выхлопа.
На транспортере имеются высокопроизводительные помпы мощностью 450 л/с, при необходимости откачивающие поступающую в корпус воду. При работе помп машина может удерживаться на плаву при потере плавучести даже до 30%. Устанавливаются фильтровентиляционная, а также и отопительно-вентиляционная установка ОВ-65Г.
Радиосвязь с другими машинами осуществляется радиостанцией Р-123, которая находится перед сиденьем командира под правым лобовым стеклом.
МТЛБ состоит на вооружении во многих странах мира. В Украине насчитывается 2090 машин. В сухопутных войсках РФ – 7000 МТЛБ, из них 2000 на хранении, в морской пехоте – 250 машин, а в береговых войсках ВМФ – 400 МТЛБ.
Автор: fox 7 мая 2014, 15:19
102
Теги: Украина
Универсальные гусеничные транспортеры УГТ-16 и УГТ-17 (аналог МТЛБ) – характеристики.
 Уфимский завод геологоразведочного оборудования
Уфимский завод геологоразведочного оборудованияВ 2018 году ООО «УЗГО» разработало техническую документацию и приступило к самостоятельному изготовлению гусеничного шасси снегоболотохода универсального гусеничного транспортера УГТ. Данное шасси является универсальным и может использоваться для различных модификаций снегоболотохода путем монтажа на его платформу различного технологического оборудования.
Снегоболотоходы на базе УГТ применяются в качестве вездеходных плавающих (в зависимости от модификации) машин, предназначенных для транспортировки грузов, людей и специализированного оборудования. Вездеходы УГТ могут использоваться при проведении геологоразведочных работ (буровые установки), строительстве линий электропередач (ямобуры, автовышки), нефтегазопроводов (КМУ, Кунги, ДЭС), железнодорожных линий и линий связи, структурами МЧС (пожарная цистерна, лестница).
В отличие от других организаций, изготавливающих аналогичные гусеничные снегоболотоходы, где в качестве основной базы используются конверсионные транспортеры МТЛБ и МТЛБу, снегоболотоход УГТ имеет собственный корпус («лодка»), изготовленный из специальной стали с усиленным днищем толщиной 8 мм.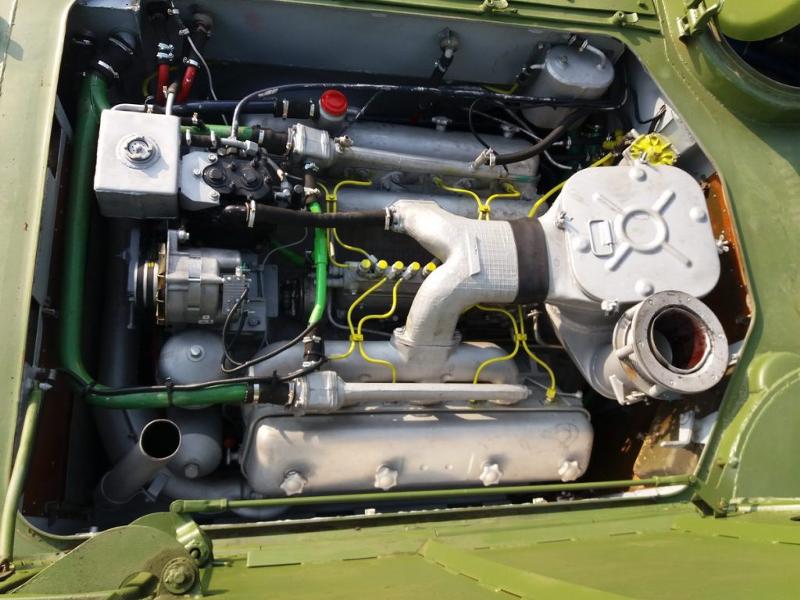
Больше описания
Технические характеристики УГТ-16 / УГТ-17
Грузоподъемность, кг:
| — номинальная, при буксировке прицепов | 4 500 |
| — максимальная, при перевозке грузов без прицепа | 4 500 |
| Вес (масса) буксирного прицепа, кг | 6 500 |
Количество посадочных мест:
| — в кабине | 8 |
| — на платформе | 12 |
Габаритные размеры, мм
| — длина (по тягово-сцепному прибору) | 7 350 |
| — ширина (по гусенице) | 3 150 |
| — высота (при клиренсе 400 мм) | 2 700 |
| Колея, мм | 2 500 |
| База, мм | 3 700 |
| Дорожный просвет, мм | 450-500 |
| Максимальная скорость (при 2 100 об/мин коленчатого вала двигателя), км/час | 60 |
| Средняя скорость по сухой грунтовой дороге с грузом и с прицепом, км/час | 26-32 |
Средний расход топлива с грузом на платформе и прицепом, кг
| — на час работы двигателя | 43-44 |
| — на 100 км пути | 90-120 |
| Объём топливных баков, л |
два бака по 500л.
|
| Тип двигателя | ЯМЗ-238БЛ, четырехтактный с непосредственным впрыском, с турбонаддувом |
Модель прямого энергопотребления для расхода топлива в обычном транспортном средстве с использованием Matlab и Simulink
Цели: Построить модель прямого энергопотребления для потребления топлива обычным транспортным средством. Оценить показатель экономии топлива для различных ездовых циклов (UDDS и HWFET). Найти вне рабочей области двигателя для цикла привода UDDS и HWFET. Наблюдать за скоростью различных компонентов по времени Ключевые слова:Вперед…
Детали проекта
Идет загрузка…
Оставить комментарий
Спасибо, что решили оставить комментарий. Пожалуйста, имейте в виду, что все комментарии модерируются в соответствии с нашей политикой комментариев, и ваш адрес электронной почты не будет опубликован по соображениям конфиденциальности. Пожалуйста, оставьте личный и содержательный разговор.
Пожалуйста, оставьте личный и содержательный разговор.
Пожалуйста, войдите, чтобы добавить комментарий
Другие комментарии…
Комментариев пока нет!
Оставьте первый комментарий
Подробнее Проекты Рошана Арьяла (15)
Проект
Задача:
ROSHAN ARYAL EV BATCH 17 Цель: выполнить моделирование на системном уровне вездехода Baja. Введение: Baja SAE — это конкурс коллегиального дизайна, который проводится Международным обществом автомобильных инженеров, в котором участвуют студенты со всех университетов и проектируют небольшой внедорожник.…
24 мая 2022 г. 09:41 IST
Читать далее
Week-4 Challenge WOT Condition Part-2
Цель:
Модель на основе карты: В модели на основе карты такие характеристики, как крутящий момент, скорость, расход топлива, входная мощность и т.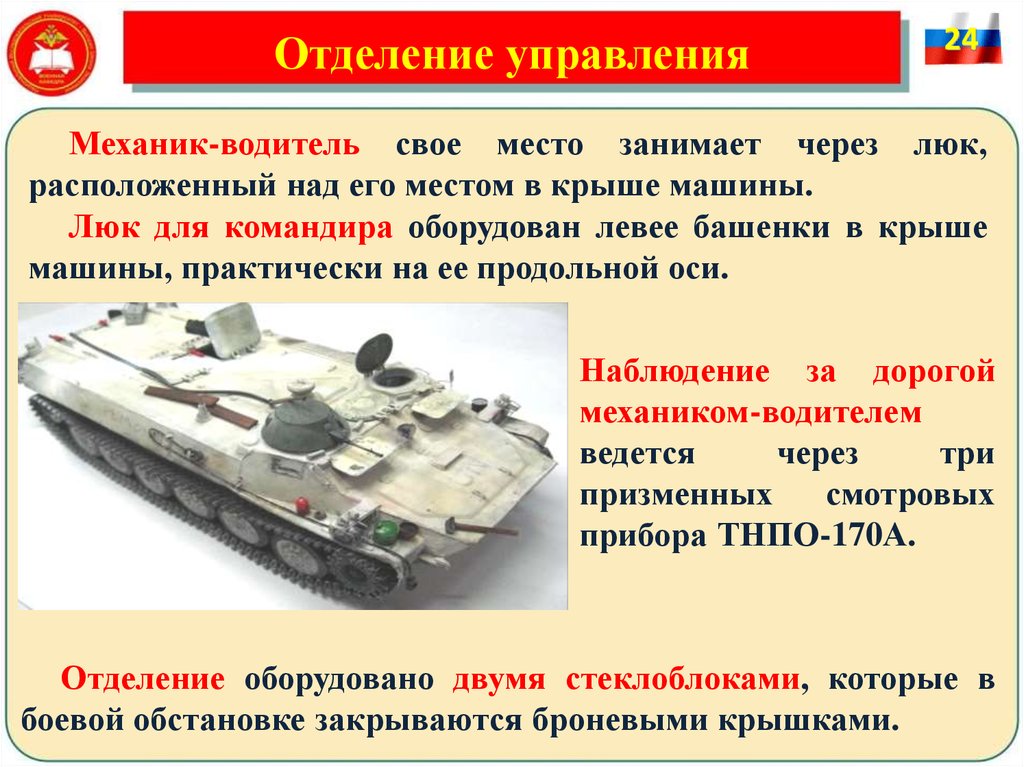 д. двигателя, двигателя, генератора берутся из фактическое значение и реализуется с помощью интерполяционных таблиц. На основе ввода в справочную таблицу определяется значение крутящего момента, мощности и т. д. Динамичный…
д. двигателя, двигателя, генератора берутся из фактическое значение и реализуется с помощью интерполяционных таблиц. На основе ввода в справочную таблицу определяется значение крутящего момента, мощности и т. д. Динамичный…
24 мая 2022 г. 09:04 IST
Подробнее
Гибридный автомобиль P1
Цель:
Название: Модель расхода топлива на основе энергии для гибридного автомобиля P1 Цели: Оценка расхода топлива гибридным приводом P1 для различных приводов цикл. Чтобы сравнить гибридную модель с обычной моделью 1. Введение С глобальным отклонением ископаемого топлива и жесткими нормами выбросов правительством…
24 мая 2022 г. 08:54 IST
Подробнее
Упреждающая модель расхода топлива на основе энергии в обычном транспортном средстве с использованием Matlab и Simulink и HWFET) Чтобы узнать рабочий диапазон двигателя для цикла привода UDDS и HWFET..jpg) Чтобы наблюдать скорость различных компонентов по отношению ко времени Ключевые слова: Вперед…
Чтобы наблюдать скорость различных компонентов по отношению ко времени Ключевые слова: Вперед…
24 мая 2022 08:36 IST
Подробнее
Адаптивный круиз-контроль
Задача:
Цель: Разработать модель адаптивной системы круиз-контроля для изменения ее режимов на основе скорости ведущего транспортного средства, скорости ведущего транспортного средства и режима работы, заданного водителем, с использованием Simulink. Цель: разработать модель в соответствии с требованиями. Сгенерировать код C из модели. Введение: адаптивный круиз-контроль (ACC)…
24 мая 2022 г. 08:01 IST
Подробнее
Мини-проект по определению направления движения автомобиля
Цель:
Цель: Разработать и проанализировать работу модели для определения направления транспортного средства с использованием Matlab и Simulink. Задачи: Разработать модель для определения направления транспортного средства в соответствии со следующими требованиями. Требование 1: ввод рулевого колеса в виде необработанной скорости (Signal_Name:SteeringWheel_YawDegreeInput) — это ввод…
Задачи: Разработать модель для определения направления транспортного средства в соответствии со следующими требованиями. Требование 1: ввод рулевого колеса в виде необработанной скорости (Signal_Name:SteeringWheel_YawDegreeInput) — это ввод…
24 мая 2022 г. 07:45 IST
Подробнее
Задача 3-й недели: инструмент ADVISOR
по умолчанию:
9.0003 9.0023 EV 1 по умолчанию модель: Для модели EV по умолчанию мы считаем, что масса груза составляет 500 кг, а начальный SOC батареи равен 100%. Аккумулятор: Тип аккумулятора: Свинцово-кислотный Вес аккумулятора: 275 кг Кол-во модулей=25 Напряжение: 308 В Общая масса рассматриваемого автомобиля: 1508 кг Первый советник открыт, затем к нему добавляется масса груза. Чем… 92)` где, M — это…21 апр. 2022 09:24 IST
Подробнее
Сравнительное исследование химического состава различных литий-ионных аккумуляторов
Цель:
Литий-ионный аккумулятор (LIB) отличается высокой плотностью энергии перезаряжаемая батарея, в которой ион лития перемещается от положительного электрода к отрицательному электроду во время зарядки и от отрицательного электрода к положительному электроду во время разрядки, а электроны перемещаются по внешней цепи. Движение электрона и иона лития одинаково, что можно проиллюстрировать…
Движение электрона и иона лития одинаково, что можно проиллюстрировать…
22 фев. 2022 13:48 IST
Подробнее
Неделя -2
Цель:
a) Модель дверного звонка Simulink: Цели: Создать модель Simulink для имитации работы дверного звонка. Наблюдать за физическим движением плунжера на основе введенных данных. Условие: Переключатель замкнут на две секунды. Модель: На рисунке выше показано описание дверного звонка на основе модели, которое содержит четыре основных…
26 сентября 2021 г. 07:56 IST
Подробнее
Проект 1 — Анализ термодинамических данных НАСА
Цель:
Цели: Извлечь все 14 коэффициентов из заданного файла данных. Чтобы использовать этот коэффициент, чтобы найти значение энтальпии, удельной теплоемкости и энтропии для отдельных видов для разных температурных диапазонов и построить их.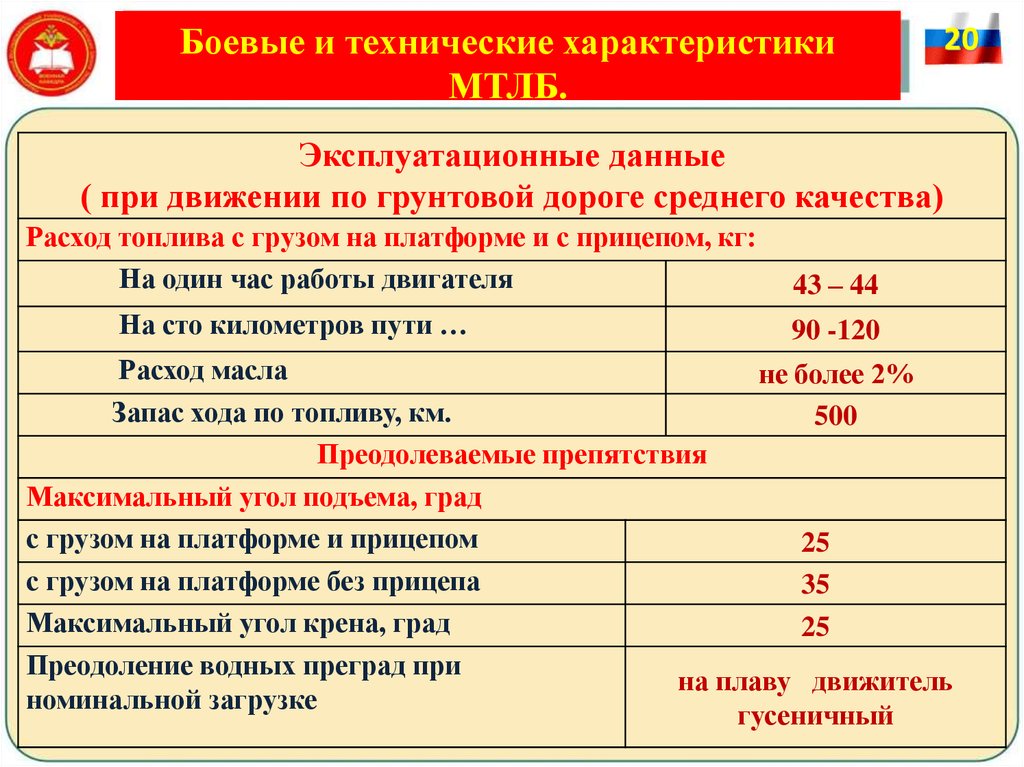 Для получения молекулярной массы отдельных видов. Теория: празинг — это процесс…
Для получения молекулярной массы отдельных видов. Теория: празинг — это процесс…
10 сент. 2021 06:09 IST
Подробнее
Неделя 4.1 — Генетический алгоритм
Цель:
Цели: Оптимизировать функцию сталагмита. Найти глобальные максимумы функции сталагмита. Теория. Функция сталагмита — это базовое представление сталагмита. Эта функция содержит различные локальные максимумы и глобальные максимумы. Генетический алгоритм — это метод поиска и оптимизации, который имитирует…
04 сент. 2021 08:05 IST
Подробнее
Аппроксимация заданного набора данных и определение параметров его качества
Цель:
Цели: Сопоставление линейной и кубической кривой заданного набора данных.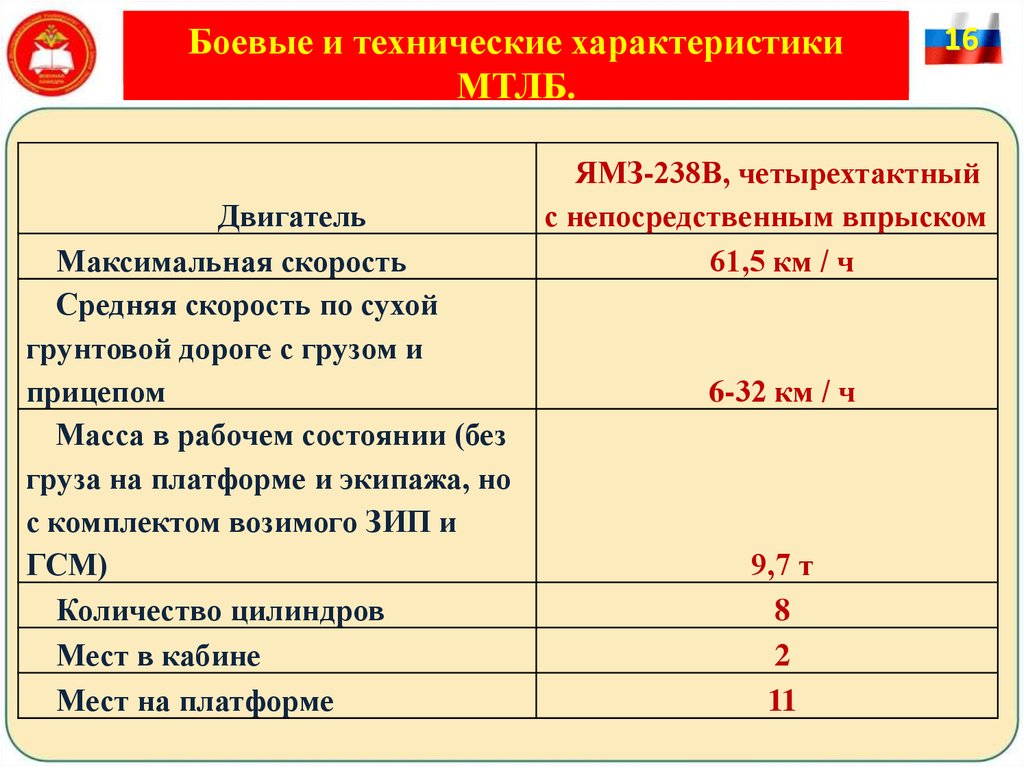 Нахождение параметров для определения качества подгонки кривой. Чтобы подогнать кривую, используйте метод splitwise. Теория: процесс построения кривой или математической функции на основе заданного набора данных называется подбором кривой. Подгонка кривой исследует…
Нахождение параметров для определения качества подгонки кривой. Чтобы подогнать кривую, используйте метод splitwise. Теория: процесс построения кривой или математической функции на основе заданного набора данных называется подбором кривой. Подгонка кривой исследует…
30 Aug 2021 07:49 IST
Подробнее
Расчет аэродинамического сопротивления автомобиля
Цель:
.Цели: 1: Знать изменение силы сопротивления по отношению к скорости, 2: Знать влияние коэффициента сопротивления на силу сопротивления. 2. Введение: Автомобиль — прекрасное изобретение человечества. С момента изобретения двигателя внутреннего сгорания (ДВС), транспорт…
21 авг. 2021 11:53 IST
Подробнее
Моделирование цикла Отто
Цель:
Проект: Коды для решения цикла Отто Цели: Получить давление и объем для различных процессов и их построение для получения диаграммы PV для цикла.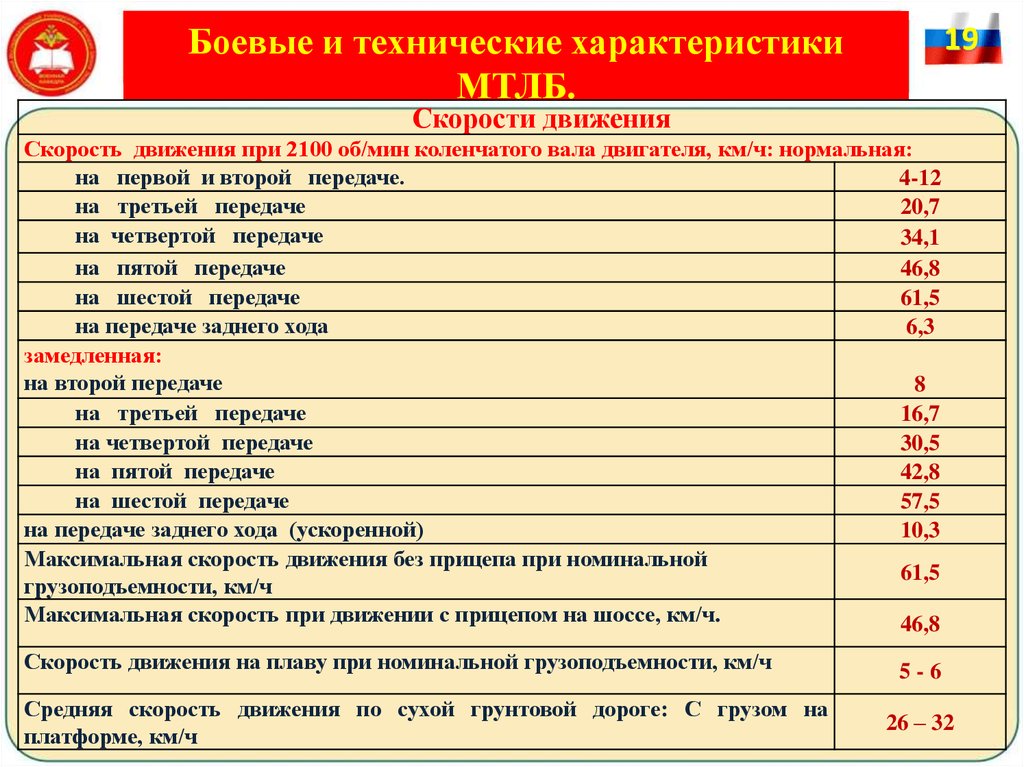 Чтобы определить тепловую эффективность, учитывая степень сжатия для современного автомобиля с бензиновым двигателем. Теория: цикл Отто, который также называют циклом постоянного объема, представляет собой…
Чтобы определить тепловую эффективность, учитывая степень сжатия для современного автомобиля с бензиновым двигателем. Теория: цикл Отто, который также называют циклом постоянного объема, представляет собой…
20 авг. 2021 07:26 IST
Подробнее
Показано 1 из 15 проектов
Платформа для экспериментальных транспортных средств — Eco-Drive Эксперимент по пересеченной местности для оптимизации расхода топлива, сентябрь 2017 г.
полевой эксперимент является частью автопарка FHWA. Каждое транспортное средство было разработано как полноценная исследовательская платформа. (Пожалуйста, обратитесь к Raboy and Ma (2017) для подробного ознакомления с экспериментальной транспортной платформой.) Каждая исследовательская платформа оснащена следующими компонентами:
- Запатентованный продольный контроллер — набор специализированных электронных блоков управления (ECU), которые обеспечивают полностью автоматическое управление ускорением и торможением автомобиля за счет прямой интеграции с существующей системой ACC автомобиля.

- Контроллер dSPACE MicroAutoBox (MAB) II — специализированная вычислительная платформа в реальном времени, которая предоставляет команды продольному контроллеру (dSPACE, Inc., 2018). Доступ к нему осуществляется через dSPACE ControlDesk через библиотеку MATLAB/Simulink (MathWorks, 2018).
- Arada LocoMate — специализированный бортовой блок связи ближнего действия (DSRC), который обеспечивает передачу и прием основных сообщений безопасности (BSM) (Arada Systems, 2018).
- Автомобильный дополнительный компьютер на базе Linux, который интегрируется с MAB. Этот компьютер собирает данные о транспортном средстве, управляет алгоритмами и обменивается данными с человеко-машинным интерфейсом (ЧМИ).
- PinPoint™ — специальное устройство GPS, которое объединяет данные от нескольких датчиков, включая GPS, для создания гораздо более надежных показателей позиционирования, скорости, ориентации и времени (Torc, 2018). Этот набор датчиков всегда активен, взвешивая все данные для обеспечения точного позиционирования, даже если данные GPS недоступны или неточны.
- TerraStar Service — поставщик услуг передачи данных, предоставляющий точные и эффективные решения для позиционирования (TerraStar, 2018). Служба использует метод спутникового позиционирования, известный как точное точечное позиционирование (PPP), который обеспечивает точность в несколько сантиметров по всему миру с использованием всего одного приемника и без необходимости в выделенном канале связи.


Конфигурация базовой системы для FHWA CAV показана на рис. 3. В центре системы управления транспортным средством находится бортовой Linux-ПК. PinPoint™ передает высокоточные данные GPS в режиме реального времени на бортовой компьютер. DSRC OBU транслирует BSM и принимает BSM других транспортных средств и передает эту информацию через ПК с Linux. Радар дальнего действия передает данные об объекте на ПК с ОС Linux. MAB получает данные от ПК с Linux, включая BSM от других транспортных средств, придорожных устройств (RSU) и данные радара. Команды управления MAB представляют собой рекомендации по скорости из алгоритма управления, встроенного в Matlab Simulink, которые затем вводятся в шину CAN автомобиля.
Источник: FHWA
Рис. 3. Поток данных систем управления транспортным средством (Ма, Лесли и Чжоу, 2018 г.).
Для обеспечения точного измерения расхода топлива был установлен расходомер для измерения количества топлива, подаваемого в двигатель, в зависимости от времени. Этот расходомер имеет точность лучше ±1,0 процента во всем диапазоне расхода 250:1, а повторяемость составляет менее ±0,1 процента. Место было выбрано исходя из характеристик топливной системы. Этот участок топливопровода легко доступен, имеет относительно низкое давление (<100 фунтов на квадратный дюйм) и находится вдали от источников тепла двигателя. Топливная система работает как безвозвратная система, то есть топливный насос в баке подает топливо, необходимое двигателю, и топливо не возвращается в бак. Это упрощает измерение расхода топлива, но накладывает дополнительные ограничения на расположение расходомера. Чтобы обеспечить достаточное давление топлива в двигателе, расходомер был установлен перед датчиком давления в магистрали, который используется для регулировки топливного насоса. Это позволит замкнутому контуру управления топливным насосом автомобиля обеспечивать соответствующее давление топлива в двигателе.
Это позволит замкнутому контуру управления топливным насосом автомобиля обеспечивать соответствующее давление топлива в двигателе.
Модифицированная топливная система показана на рис. 4. Для упрощения модификации автомобиля был приобретен запасной топливопровод и модифицирован расходомер. Затем был удален оригинальный топливопровод и установлен модифицированный топливопровод. Первоначальный топливопровод был сохранен для повторной установки по завершении эксперимента.
Источник: FHWA
Рис. 4. Установка расходомера топлива.
Выходной сигнал расходомера представляет собой прямоугольную волну с частотой, прямо пропорциональной расходу жидкости. Отношение (К-фактор) для этой модели расходомера составляет 20 000 импульсов на литр. Благодаря встроенной функции измерения частоты, длительности импульса и коэффициента заполнения MAB является логичным выбором для взаимодействия с этим источником данных. Таким образом, расходомер был подключен к MAB, а программное обеспечение было модифицировано для преобразования прямоугольной волны в измерение расхода.