1.11. Электрическая схема передвижения крана ккс-10
Силовую цепь коммутируют магнитный пускатель КМ2, максимально токовые реле К А13, К А14, К А15 и типовая реверсивная панель А1 Кран имеет два электродвигателя М1 и М2, два тормоза, оборудованных гидро толкателями М7 и М8. Управление электроприводом осуществляется с помощью контроллера ЗА 16, который своими контактами включает и выключает секции сопротивлений Д1 и К.2 в цепи роторных обмоток двигателей. Отключение части сопротивлений происходит на 2-й позиции, движение крана ускоряется. На 5-й позиции контактами контроллера 8 А16 выводятся все дополнительные сопротивления — кран работает на полной скорости в режиме естественных характеристик электродвигателей.
Из
схемы видно, что роторные цепи двигателей
выполнены независимыми, т. е. отсутствует
система электрического вала, а возможные
забегания одной тележки относительно
другой воспринимают крановые
металлоконструкции. Изменение направления
вращения двигателей происходит при
переключении статорных цепей реверсором
А1, катушки которого включены в цепь 1-й
позиции контроллера. При повороте
рукоятки контроллера «назад» под
напряжением оказывается катушка КМ3.1,
замыкающая контакты КМ3.2 реверсора. При
повороте рукоятки контроллера на 1-ю
позицию положения «вперед» цепь катушки
КМ3.1 размыкается, а цепь катушки КМ4.1
замыкается, это позволяет замкнуть
контакты КМ4.2 и разомкнуть контакты
КМ3.2, двигатели вращаются в противоположном
направлении.
Изменение направления
вращения двигателей происходит при
переключении статорных цепей реверсором
А1, катушки которого включены в цепь 1-й
позиции контроллера. При повороте
рукоятки контроллера «назад» под
напряжением оказывается катушка КМ3.1,
замыкающая контакты КМ3.2 реверсора. При
повороте рукоятки контроллера на 1-ю
позицию положения «вперед» цепь катушки
КМ3.1 размыкается, а цепь катушки КМ4.1
замыкается, это позволяет замкнуть
контакты КМ4.2 и разомкнуть контакты
КМ3.2, двигатели вращаются в противоположном
направлении.
Отключение привода от силовой цепи происходит при разомкнутых контактах магнитного пускателя КМ2.2, катушка которого включена в цепь защитной панели 6—13
Рисунок 4. Электрическая схема привода передвижения моста крана
Электродвигатели
МЗ и М4 грузовой тележки крана ККС-10
(рис.5) получают ускорение непосредственной
коммутацией секций резисторов ЦЗ и Ц4
кулачковыми контроллерами ЗАМ и 8А15.
Реверсируются двигатели рукояткой контроллера, на первых позициях которого происходит изменение включения фаз статорной обмотки. На вторых и последующих позициях отключены части пускового сопротивления, при этом двигатель развивает максимальную скорость. Растормаживание происходит на первых позициях контроллера, когда гидротолкатель или магнит тормоза оказываются под напряжением.
Пусковые
сопротивления крана ККС-10 имеют следующую
разбивку по ступеням регулирования.
Механизм подъема груза — ящик НФ-1А на
ступенях: Р2—Р4 — 0,165 Ом, Р4—Р62 — 2,01 Ом,
РЗ—Рб— 1,2 Ом, Р6— Р62 — 0А Ом, Р1—Р5 — 0,59
Ом; ящик НФ-11А: Р6— Р61 — 1,3 Ом, Р61—Р5 — 41
Ом. Механизм передвижения моста — два
ящика НК-1А в каждом: Р1—Р5 — 1,86 Ом, Р5—Р61—
12,0 Ом, Р61—Р6 —6,0 Ом, РЗ— Р6 — А Ом, Р2—Р4
— 0,323 Ом, Р4—Р62 — 6,28 Ом, Р62—Р6 — 1,204 Ом.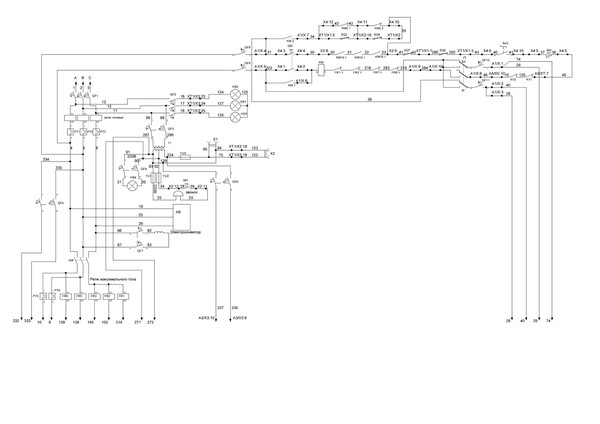
Разбивка сопротивлений для других кранов приведена на их принципиальных электрических схемах и дается, как правило, в паспортной табличке контроллера.
Рисунок 5. Электрическая схема привода грузовой тележки крана
Схема Электрическая Принципиальная Козлового Крана
Применяя кулачковые шайбы различного профиля, получают необходимую последовательность замыкания размыкания контактов контроллера. Четыре селеновых столба соединены по однофазной мостовой схеме, осуществляющей двухполупериодное выпрямление переменного тока.
Рекомендуемые изменения в электрических схемах кранов
 youtube.com/embed/_7BNonUgOw8″ frameborder=»0″ allowfullscreen=»»>
youtube.com/embed/_7BNonUgOw8″ frameborder=»0″ allowfullscreen=»»> Схемы кранов строительных
Электрический вал обеспечивает равномерную загрузку двигателей при перекосах моста, уменьшает до минимума износ реборд ходовых колес.
Для этого рукоятки конечных выключателей имеют механизмы возврата в исходную позицию. Начинается силовой спуск груза. Командоконтроллеры монтируют в кресле машиниста с тем, чтобы не заслонять обзорности рабочего места; командоконтроллеры представляют собой комплектный пульт управления.
Тип проката и его сечение зависят от силы потребляемого краном тока, длины линии и условий эксплуатации крана. Теперь скорость спуска зависит только от величины сопротивления в цепи ротора и включенных в нее выпрямителей.
Особенностью мостовых кранов, управляемых с пола, является возможность доступа на кран для ремонта и контроля только в специально отведенных местах, снабженных соответствующими площадками осмотра механизмов и электрооборудования.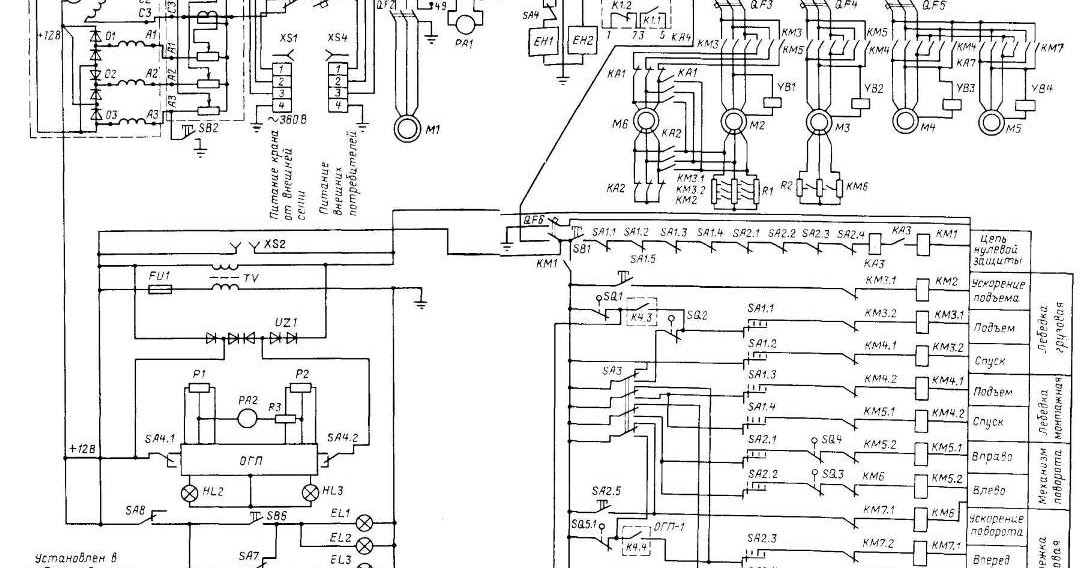 Рабочее и нулевое положения рукоятки фиксируют с помощью храпового механизма; на фиксаторе имеются такие упоры, которые ограничивают перемещение рукоятки в крайних положениях.
Рабочее и нулевое положения рукоятки фиксируют с помощью храпового механизма; на фиксаторе имеются такие упоры, которые ограничивают перемещение рукоятки в крайних положениях.
Этот блок собран на рейках в шкафу электрооборудования над кабиной крановщика. Затем тихоходная обмотка отключается.
Силовые цепи обозначаются в схеме жирными линиями, а все остальные цепа — тонкими. При исчезновении магнитного потока в моменты перехода тока через нулевое значение может произойти вибрация подвижного контакта Для предотвращения этого в прорези на торцах ярма укладывают короткозамкнутый виток в виде латунной рамки охватывающей часть площади магнитопровода. Все должно располагаться в первом квадранте. Следует отметить, что применение гибкого электрокабеля упрощает конструкцию токоподвода, снижает его массу и повышает надежность.
Концы сортового проката соединяют контактной сваркой. Короткозамкнутые двигатели небольшой мощности пускают без дополнительных устройств, так как их характеристики мягче, чем у двигателей с фазным ротором. При дальнейшем прижатии контактов подвижный контакт смещается относительно неподвижного и притирается к нему, чем обеспечивает самоочищение рабочих поверхностей контактов. На правой консоли устанавливают два кронштейна, между которыми подвешивают ремонтные площадки.
При дальнейшем прижатии контактов подвижный контакт смещается относительно неподвижного и притирается к нему, чем обеспечивает самоочищение рабочих поверхностей контактов. На правой консоли устанавливают два кронштейна, между которыми подвешивают ремонтные площадки.
Электрооборудование козлового крана грузоподъемностью 47 тонн
Кнопку с грибовидным толкателем, нажимаемым ладонью руки, применяют для экстренного отключения линейного контактора защитной панели, мгновенного разрыва цепей управления и быстрой остановки крана, в связи с чем ее называют аварийным выключателем.
Чтобы избежать перегрузок сети, в цепь управления ротора вводят пускорегулирующие сопротивления, которые за счет увеличения общего сопротивления снижают э.
Монтирование крана ккс Кран ККС монтируется с помощью полиспастов с тяговым усилием 50 кН без использования других грузоподъемных механизмов рис. Асинхронные двигатели трехфазного переменного тока имеют маркировку, состоящую из букв и цифр.
Асинхронные двигатели трехфазного переменного тока имеют маркировку, состоящую из букв и цифр.
В схеме токовой защиты рис. Допускаемая частота включений контакторов достигает в час.
Схемы кранов и особенности защиты
Шкаф с двумя запирающимися дверцами выполнен из листовой стали. По принципу работы различают два вида контроллеров: силовые непосредственно ручного управления и командокон- троллеры дистанционного управления.
Таким образом, произойдет нарушение ст. Электроприводы крановых механизмов работают в повторно-кратковременном режиме при большом числе включений в час, обеспечивают широкий диапазон регулирования скоростей рабочих движений, переменные по величине и направлению рабочие нагрузки и должны выдерживать значительные перегрузки при разгонах торможениях механизмов и их реверсировании.
Эл.безопасность
На ней изображены элементы, необходимые для его работы. Короткозамкнутые двигатели небольшой мощности пускают без дополнительных устройств, так как их характеристики мягче, чем у двигателей с фазным ротором.
| Имя файла | Автокад | Имя файла | Автокад | ||
YKA-T01-039S239-2-48 | .чертеж | YKC-T06-040S225-2-60 | .чертеж | ||
| YKA-T01-066S239-2-54 | .чертеж | YKC-T07-033S420-2-60 | .чертеж | ||
| YKA-T02-020S420-2-48 | .чертеж | YKC-T07-033S420-2-66 | .чертеж | ||
| YKA-T02-033S420-2-54 | . pdf pdf | .чертеж | YKC-T07-033S420-2-72 | .чертеж | |
| YKA-T03-020S420-2-48 | .чертеж | YKC-T07-033S420-2-78 | .чертеж | ||
| YKA-T03-033S420-2-54 | .чертеж | YKC-T07-040S225-2-60 | .чертеж | ||
| YKA-TD3-020S420-2-48 | .чертеж | YKC-T07-040S225-2-66 | .чертеж | ||
| YKA-TD3-033S420-2-54 | .чертеж | YKC-T07-040S225-2-72 | .чертеж | ||
| YKB-T02-040S231-2-54 | .чертеж | YKC-T07-066S225-2-66 | .чертеж | ||
| YKB-T02-040S231-2-60 | .чертеж | YKC-T07-066S225-2-72 | .чертеж | ||
| YKB-T02-040S231-2-66 | .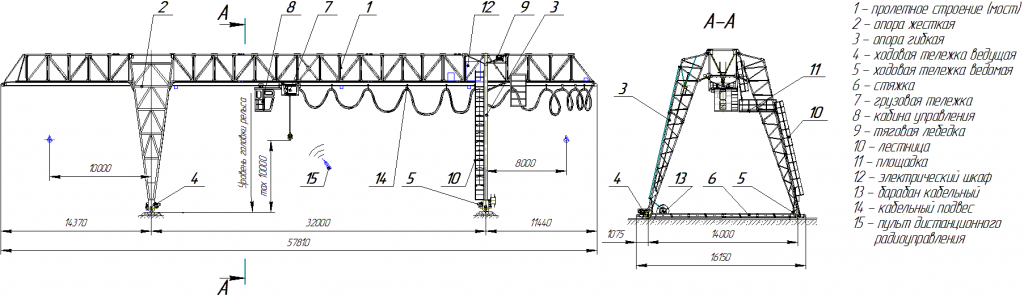 pdf pdf | .чертеж | YKC-T07-066S225-2-78 | .чертеж | |
| YKB-T02-040S239-2-54 | .чертеж | YKC-T07-066S420-2-96 | .чертеж | ||
| YKB-T02-040S239-2-60 | .чертеж | YKC-T09-020S420-2-60 | .чертеж | ||
| YKB-T02-040S239-2-66 | .чертеж | YKC-T09-020S420-2-66 | .чертеж | ||
| YKB-T02-066S231-2-60 | .чертеж | YKC-T09-020S420-2-72 | .чертеж | ||
| YKB-T02-066S231-2-66 | .чертеж | YKC-T09-033S420-2-60 | .чертеж | ||
| YKB-T02-066S231-2-72 | .чертеж | YKC-T09-033С420-2-66 | .чертеж | ||
| YKB-T02-066S239-2-60 | . pdf pdf | .чертеж | YKC-T09-033S420-2-72 | .чертеж | |
| YKB-T02-066S239-2-66 | .чертеж | YKC-T09-033S420-2-78 | .чертеж | ||
| YKB-T02-066S239-2-72 | .чертеж | YKC-T09-066S420-2-96 | .чертеж | ||
| YKB-T02-131S239-2-84 | .чертеж | YKC-T10-020S420-2-60 | .чертеж | ||
| YKB-T03-040S231-2-54 | .чертеж | YKC-T10-020S420-2-66 | .чертеж | ||
| YKB-T03-040S231-2-60 | .чертеж | YKC-T10-020S420-2-72 | .чертеж | ||
| YKB-T03-040S231-2-66 | .чертеж | YKC-T10-033S420-2-60 | .чертеж | ||
| YKB-T03-066S231-2-60 | . pdf pdf | .чертеж | YKC-T10-033S420-2-66 | .чертеж | |
| YKB-T03-066S231-2-66 | .чертеж | YKC-T10-033S420-2-72 | .чертеж | ||
| YKB-T03-066S231-2-72 | .чертеж | YKC-T10-033S420-2-78 | .чертеж | ||
| YKB-T04-020S420-2-54 | .чертеж | YKC-T10-066S420-2-96 | .чертеж | ||
| YKB-T04-020S420-2-60 | .чертеж | YKC-T12-020S413-2-60 | .чертеж | ||
| YKB-T04-020S420-2-66 | .чертеж | YKC-T12-020S413-2-66 | .чертеж | ||
| YKB-T04-033S420-2-60 | .чертеж | YKC-T12-020S413-2-72 | .чертеж | ||
| YKB-T04-033S420-2-66 | . pdf pdf | .чертеж | YKC-T12-033S413-2-66 | .чертеж | |
| YKB-T04-033S420-2-72 | .чертеж | YKC-T12-033S413-2-72 | .чертеж | ||
| YKB-T04-066S420-2-84 | .чертеж | YKC-T12-033S413-2-78 | .чертеж | ||
| YKB-T05-020S420-2-54 | .чертеж | YKC-T15-020S413-2-60 | .чертеж | ||
| YKB-T05-020S420-2-60 | .чертеж | YKC-T15-020S413-2-66 | .чертеж | ||
| YKB-T05-020S420-2-66 | .чертеж | YKC-T15-020S413-2-72 | .чертеж | ||
| YKB-T05-033S420-2-60 | .чертеж | YKC-T15-020S425-2-60 | .чертеж | ||
| YKB-T05-033S420-2-66 | . pdf pdf | .чертеж | YKC-T15-020S425-2-66 | .чертеж | |
| YKB-T05-033S420-2-72 | .чертеж | YKC-T15-020S425-2-72 | .чертеж | ||
| YKB-T05-066S420-2-84 | .чертеж | YKC-T15-033S413-2-66 | .чертеж | ||
| YKB-T06-020S416-2-54 | .чертеж | YKC-T15-033S413-2-72 | .чертеж | ||
| YKB-T06-020S416-2-60 | .чертеж | YKC-T15-033S413-2-78 | .чертеж | ||
| YKB-T06-020S416-2-66 | .чертеж | YKC-T15-033S425-2-66 | .чертеж | ||
| YKB-T06-033S416-2-60 | .чертеж | YKC-T15-033S425-2-72 | .чертеж | ||
| YKB-T06-033S416-2-66 | .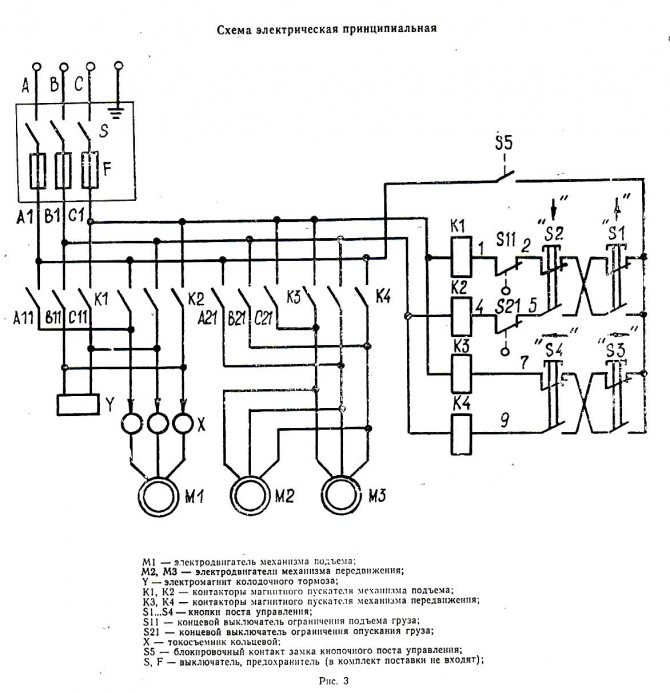 pdf pdf | .чертеж | YKC-T15-033S425-2-78 | .чертеж | |
| YKB-T06-033S416-2-72 | .чертеж | ИКД-Т07-056С225-2-66 | .чертеж | ||
| YKB-T07-020S416-2-60 | .чертеж | ИКД-Т07-056С225-2-72 | .чертеж | ||
| YKB-T07-020S416-2-66 | .чертеж | ИКД-Т07-056С225-2-78 | .чертеж | ||
| YKB-T07-033S416-2-72 | .чертеж | ИКД-Т07-093С225-2-66 | .чертеж | ||
| YKC-T03-040S239-2-60 | .чертеж | ИКД-Т07-093С225-2-72 | .чертеж | ||
| YKC-T03-040S239-2-66 | .чертеж | ИКД-Т07-093С225-2-78 | .чертеж | ||
| YKC-T03-040S239-2-72 | . pdf pdf | .чертеж | ИКД-Т15-028С420-2-66 | .чертеж | |
| YKC-T03-066S239-2-60 | .чертеж | ИКД-Т15-028С420-2-72 | .чертеж | ||
| YKC-T03-066S239-2-66 | .чертеж | ИКД-Т15-028С420-2-78 | .чертеж | ||
| YKC-T03-066S239-2-72 | .чертеж | ИКД-Т15-046С420-2-66 | .чертеж | ||
| YKC-T03-066S239-2-78 | .чертеж | ИКД-Т15-046С420-2-72 | .чертеж | ||
| YKC-T03-131S239-2-84 | .чертеж | ИКД-Т15-046С420-2-78 | .чертеж | ||
| YKC-T04-040S239-2-60 | .чертеж | ИКД-Т15-093С420-2-90 | .чертеж | ||
| YKC-T04-040S239-2-66 | .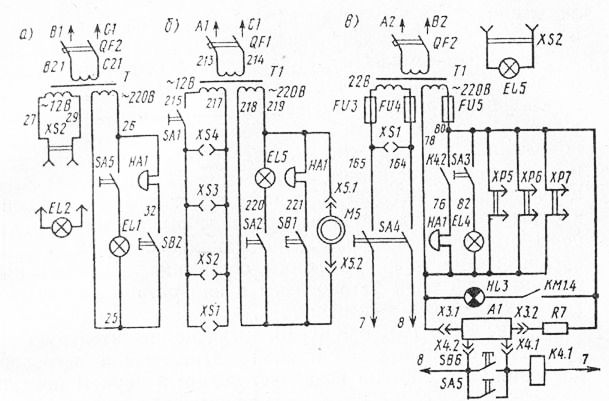 pdf pdf | .чертеж | ИКЭ-Т20-020С416-2-66 | .чертеж | |
| YKC-T04-040S239-2-72 | .чертеж | ИКЭ-Т20-020С416-2-72 | .чертеж | ||
| YKC-T04-066S239-2-60 | .чертеж | ИКЭ-Т20-020С416-2-78 | .чертеж | ||
| YKC-T04-066S239-2-66 | .чертеж | ИКЭ-Т20-033С416-2-66 | .чертеж | ||
| YKC-T04-066S239-2-72 | .чертеж | ИКЭ-Т20-033С416-2-72 | .чертеж | ||
| YKC-T04-066S239-2-78 | .чертеж | ИКЭ-Т20-033С416-2-78 | .чертеж | ||
| YKC-T04-131S239-2-84 | .чертеж | ИКЭ-Т20-066С416-2-90 | .чертеж | ||
| YKC-T05-040S239-2-60 | . pdf pdf | .чертеж | ИКЭ-Т25-020С410-2-66 | .чертеж | |
| YKC-T05-040S239-2-66 | .чертеж | ИКЭ-Т25-020С410-2-72 | .чертеж | ||
| YKC-T05-040S239-2-72 | .чертеж | ИКЭ-Т25-020С410-2-78 | .чертеж | ||
| YKC-T05-066S239-2-60 | .чертеж | ИКЭ-Т25-033С410-2-66 | .чертеж | ||
| YKC-T05-066S239-2-66 | .чертеж | ИКЭ-Т25-033С410-2-72 | .чертеж | ||
| YKC-T05-066S239-2-72 | .чертеж | ИКЭ-Т25-033С410-2-78 | .чертеж | ||
| YKC-T05-066S239-2-78 | .чертеж | ИКЭ-Т25-066С410-2-90 | .чертеж | ||
| YKC-T05-131S239-2-84 | . pdf pdf | .чертеж | ИКЭ-Т30-020С410-2-66 | .чертеж | |
| YKC-T06-040S225-2-66 | .чертеж | ИКЭ-Т30-020С410-2-72 | .чертеж | ||
| YKC-T06-040S225-2-72 | .чертеж | ИКЭ-Т30-020С410-2-78 | .чертеж | ||
| YKC-T06-066S225-2-66 | .чертеж | ИКЭ-Т30-020С410-2-90 | .чертеж | ||
| YKC-T06-066S225-2-72 | .чертеж | ИКЭ-Т30-033С410-2-66 | .чертеж | ||
| YKC-T06-066S225-2-78 | .чертеж | ИКЭ-Т30-033С410-2-72 | .чертеж | ||
| YKC-T07-020S420-2-60 | .чертеж | ИКЭ-Т30-033С410-2-78 | .чертеж | ||
| YKC-T07-020S420-2-66 | . pdf pdf | .чертеж | ИКЭ-Т30-033С410-2-90 | .чертеж | |
| YKC-T07-020S420-2-72 | .чертеж | ИКЭ-Т30-066С410-2-102 | .чертеж | ||
РАБОТЫ ЭЛЕКТРИЧЕСКИЙ ПРОЕКТИКИ ДЛОВАЯ ДЕЙСТВИТЕЛЬНОСТИ — 681 Активные электротехники инженера -инженера (ноябрь 2022)
1 неделя назад
Инженер -электрик для Канады
Аркадные виз.
- Обычный
- 30 Должностей
1 неделю назад
Инженер по проектированию и оценке электрооборудования
MACKENZIE MODERN IT SOLUTIONS PRIVA…
Бангалор
2-7 лет
- Обычный
- 99 позиции
Получить ваше применение
2 недели назад
.
 Контрактный
КонтрактныйГорячий 1 день назад
Инженер проекта
Бюро трудоустройства Саи Кришны Наем…
Объединенные Арабские Эмираты
От 5 до 10 лет
- Regular
- 2 Positions
Get Personalised Job Matches
Based on your experience, skills and interest
2 weeks ago
electrical engineer description
IT Solutions
5 to 7 Yrs
- Contractual
Hot2 дня назад
Инженер по системам управления
BorgWarner Inc.
Ченнаи
от 5 до 14 лет
- Обычный
Насколько релевантными вы считаете результаты поиска работы?
- 1
- 2
- 3
- 4
- 5
Very PoorExcellent
1 week ago
Electrical Design Engineer (Schematic)
Siemens Limited
0 to 3 Yrs
- Regular
2 недели назад
Инженер-электрик
Международная служба сертификации.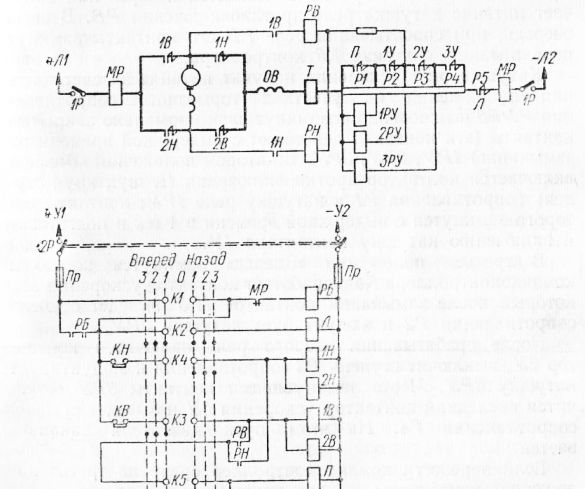 ..
..
Город Мумбаи
От 0 до 1 года
- Обычный
- 10 Должностей
2 недели назад
Инженер -инженер -электрик. Годы
- Контрактный
Hot3 дня назад
Запрос кандидатов на должность старшего менеджера по технологиям …
Tata Motors Ltd.
Hyderabad
5 to 10 Yrs
- Regular
1 week ago
Hiring For Civil,Site,Mechanical Electrical Quality Pr …
D Y EARTH MOVERS
Bhubaneswar
0 to 4 Yrs
- Обычный
- 6 Должностей
1 неделю назад
Инженер-сметчик (электрощит) в Viman …
PRIMOHUNT GLOBAL SERVICES
От 1 до 5 лет
HOT1 DAY назад
E — Инженер Plan
DC Consultants
Navi Mumbai
с 3 до 8 лет
- Регулярное
1 WEEK AGY
.
