Управление механизмами поворота, сцепления и тормозами МТЛБ
| Обозначение или №стандарта | Марка АТ/БТ/, изделия. Наименование запасных частей МТ-ЛБ, МТ-ЛБВ | Количество в изделии , шт. | Норма расхода на 100 ремонтов шт. | Норма расхода на 1 ремонт, шт. | |
| МТ-ЛБ | МТ-ЛБВ | ||||
| 6.22.010 | Кронштейн рычагов в сборе | 1 | 1 | 5 | 0,05 |
| 6.22.012 | Кронштейн рычагов с сектором и втулками | 1 | 1 | 5 | 0,05 |
| 6.22.013 | Рычаг управления правый | 1 | 1 | 10 | 0,1 |
| 6.22.014 | Рычаг управления левый | 1 | 1 | 10 | 0,1 |
6. | Валик рычагов управления с муфтой | 1 | 1 | 40 | 0,4 |
| 6.22.016 | Защелка правая | 1 | 1 | 10 | 0,1 |
| 6.22.017 | Защелка левая | 1 | 1 | 10 | 0,1 |
| 6.22.020 | Вал промежуточный в сборе | 1 | 1 | 5 | 0,05 |
| 6.22.023 | Вал передаточный | 1 | 1 | 15 | 0,15 |
| 6.22.024 | Кронштейн передаточного вала | 1 | 1 | 10 | 0,1 |
| 6.22.025 | Валик с муфтой | 1 | 1 | 20 | 0,2 |
| 6.22.027 | Кронштейн в сборе | 1 | 1 | 10 | 0,1 |
| 6.22.028 | Кронштейн со втулками | 2 | 2 | 10 | 0,1 |
6. 22.029 22.029 | Валик с рычагом в сборе | 1 | 1 | 15 | 0,15 |
| 6.22.030 | Тяга левого рычага управления | 1 | 1 | 10 | 0,1 |
| 6.22.032 | Тяга правого рычага управления | 1 | 1 | 10 | 0,1 |
| 6.22.035 | Мостик левый | 1 | 1 | 20 | 0,2 |
| 6.22.040 | Мостик правый | 1 | 1 | 20 | 0,2 |
| 6.22.042 | Педали в сборе | 1 | 1 | 5 | 0,05 |
| 6.22.043 | Вал педали сцепления | 1 | 1 | 10 | 0,1 |
| 6.22.048 | Кронштейн в сборе | 1 | 1 | 10 | 0,1 |
| 6.22.049 | Валик с рычагом в сборе | 1 | 1 | 10 | 0,1 |
6. 22.050 22.050 | Кронштейн сервопружины | 1 | 1 | 10 | 0,1 |
| 6.22.055 | Тяга тормоза в сборе | 1 | 1 | 10 | 0,1 |
| 6.22.056 | Тяга блокировки | 2 | 2 | 10 | 0,1 |
| 6.22.057-1 | Тяга сцепления | 1 | 1 | 5 | 0,05 |
| 6.22.108 | Тяга собачки | 2 | 2 | 20 | 0,2 |
| 6.22.125 | Кронштейн | 2 | 2 | 10 | 0,1 |
| 6.22.128 | Рычаг | 1 | 1 | 10 | 0,1 |
| 6.22.154-1 | Пружина оттяжная | 1 | 1 | 50 | 0,5 |
| 6.22.166 | Рычаг переходной | 1 | 1 | 10 | 0,1 |
6. 22.170 22.170 | Тяга тормоза | 1 | 1 | 20 | 0,2 |
| 8.22.026 | Кронштейн со втулками | 1 | 1 | 10 | 0,1 |
| 8.22.045 | Тяга рычага фрикциона механизма поворота | 2 | 2 | 20 | 0,2 |
| 8.22.047-1 | Тяга | 1 | 1 | 10 | 0,1 |
| 8.22.105 | Втулка | 1 | 1 | 80 | 0,8 |
| 8.22.110 | Собачка | 2 | 2 | 10 | 0,1 |
| 8.22.111 | Палец | 2 | 2 | 50 | 0,5 |
| 8.22.114 | Пружина собачки | 2 | 2 | 40 | 0,4 |
| 8.22.136 | Втулка | 2 | 2 | 100 | 1 |
8. 22.146 22.146 | Рычаг | 1 | 1 | 5 | 0,05 |
| 8.22.147 | Палец стопорный | 4 | 4 | 200 | 2 |
| 8.22.156 | Втулка валика рычага фрикциона механизма поворота | 4 | 4 | 60 | 0,6 |
| 8.22.161 | Рычаг | 3 | 3 | 30 | 0,3 |
| 8.22.170 | Вилка | 2 | 2 | 10 | 0,1 |
| 8.22.171 | Вилка | 2 | 2 | 10 | 0,1 |
| 8.22.203 | Рычаг | 1 | 1 | 5 | 0,05 |
| 8.22.222 | Сервопружина | 1 | 1 | 50 | 0,5 |
| 8.22.236 | Вилка | 2 | 2 | 20 | 0,2 |
8. 22.247 22.247 | Вилка | 4 | 4 | 60 | 0,6 |
| 8.23.159 | Вилка регулировочная короткая | 2 | 2 | 10 | 0,1 |
| 8.25.015 | Тяга | 2 | 2 | 10 | 0,1 |
| А5.22.056-2 | Рычаг тормоза механизма поворота в сборе | 2 | 2 | 20 | 0,2 |
| А5.22.087-1 | Пружина мостика управления в сборе | 4 | 4 | 20 | 0,2 |
| А5.22.165-2 | Втулка рычага тормоза механизма поворота | 2 | 2 | 30 | 0,3 |
| А5.22.192-3 | Ось рычага тормоза механизма поворота | 2 | 2 | 30 | 0,3 |
| А5.22.251-1 | Болт регулировочный (учтены группы 6.22; 6.23) | 8 | 8 | 200 | 2 |
А13. 01.003 01.003 | Шайба рукоятки | 2 | 2 | 160 | 1,6 |
| А13.01.004 | Кольцо стопорное | 2 | 2 | 160 | 1,6 |
Запчасти и схема управления двигателем МТЛБу от ТехГазСнаб
Запчасти для вездеходов
Выбор запчастей для системы управления двигателем двигателя для вездехода МТЛБу.
Управление двигателем снегоболотохода МТЛБу осуществляется ножным и ручным приводами.
Ручной привод снегоболотохода МТЛБу применяется для фиксации определенного режима работы двигателя, а также для остановки двигателя.
Схема соединения
Вы можете заказать запчасти и комплектующие системы управления двигателем вездехода МТЛБу, используя каталог запчастей с онлайн заказом по названию комплектующего или каталожному номеру с доставкой в регионы России.
Также компания «ТехГазСнаб» продаёт вездеходы типа МТЛБ вездеходы ГАЗ-71, болотоходы «Витязь», снегоболотоходы МТЛБу, вездеходы амфибии ГАЗ-34039, гусеничные тягачи ГАЗ-73, гусеничные транспортеры тягачи ГТ-Т
Каталог запчастей
| 1В12.20.001 | Управление двигателем МТЛБу | |
| 1В12.20.021 | Педаль МТЛБу | 1 |
| 1В12.20.028 | Тяга МТЛБу | 1 |
| 1В12.20.038-1 | Кронштейн МТЛБу | 1 |
| 8.20.022-1 | Кронштейн МТЛБу | 1 |
| 8.20.023-1 | Акселератор МТЛБу | 1 |
| 8.20.024-2 | Валик МТЛБу | 1 |
| 8.20.025-1 | Втулка МТЛБу | 1 |
| 8.20.026-1 | Трубка МТЛБу | 1 |
| 8.20.027-2 | Валик МТЛБу | 1 |
| 8.20.028-1 | Трубка МТЛБу | 1 |
8. 20.029-2 20.029-2 | Валик МТЛБу | 1 |
| 8.20.032-1 | Тяга МТЛБу | 1 |
| 8.20.033-1 | Тяга МТЛБу | 1 |
| 8.20.035А | Тяга МТЛБу | 1 |
| 8.20.037-1 | Кронштейн МТЛБу | 1 |
| 8.20.039-2 | Валик МТЛБу | 1 |
| 1В12.20.105 | Рычаг МТЛБу | 2 |
| 1В12.20.117 | Тяга МТЛБу | 1 |
| 5.20.126 | Диск нажимной МТЛБу | 1 |
| 5.20.127 | Пружина МТЛБу | 1 |
| 5.20.128 | Диск трения МТЛБу | 2 |
| 5.20.132 | Шайба упорная МТЛБу | 1 |
| 8.20.101-1 | Кронштейн МТЛБу | 1 |
| 8.20.103-1 | Рычаг МТЛБу | 1 |
| 8.20.104 | Вилка МТЛБу | 8 |
| 8.20.115-1 | Тяга МТЛБу | 1 |
| 8.20.116-1 | Тяга МТЛБу | 1 |
8. 20.118-1 20.118-1 | Тяга МТЛБу | 1 |
| 8.20.126 | Палец МТЛБу | 6 |
| 8.20.131 | Втулка МТЛБу | 5 |
| 8.22.229 | Втулка МТЛБу | 2 |
| 8.22.231 | Педаль МТЛБу | 1 |
| 8.22.234 | Палец МТЛБу | 1 |
Control System Toolbox — MATLAB
Проектирование и анализ систем управления
Получить бесплатную пробную версию
Посмотреть цены
Control System Toolbox™ предоставляет алгоритмы и приложения для систематического анализа, проектирования и настройки линейных систем управления. Вы можете задать свою систему как передаточную функцию, пространство состояний, усиление с нулевым полюсом или модель частотной характеристики. Приложения и функции, такие как график переходной характеристики и график Боде, позволяют анализировать и визуализировать поведение системы во временной и частотной областях.
Вы можете настроить параметры компенсатора, используя интерактивные методы, такие как формирование петли Боде и метод корневого геометрического места. Набор инструментов автоматически настраивает компенсаторы SISO и MIMO, включая ПИД-регуляторы. Компенсаторы могут включать в себя несколько настраиваемых блоков, охватывающих несколько контуров обратной связи. Вы можете настраивать контроллеры с запланированным усилением и задавать несколько целей настройки, таких как отслеживание задания, подавление возмущений и запасы устойчивости. Вы можете проверить свой проект, проверив время нарастания, перерегулирование, время установления, запасы по усилению и фазе и другие требования.
Начало работы:
- Линейные модели
- Линейный анализ
- ПИД-регулятор
- Конструкция компенсатора
- Автоматическая настройка
- Планирование усиления
- Оценка состояния и проектирование LQG
- Дизайн управления в Simulink

2:00 Продолжительность видео 2 часа.
Что такое панель инструментов системы управления?
Бесплатные примеры
Примеры настройки ПИД-регулятора и код
См. примеры
Линейные модели
Создавайте линейные модели вашей системы управления, используя передаточную функцию, пространство состояний и другие представления. Дискретизируйте модели. Упростите модели, уменьшив их порядок.
Передаточные функции и модели в пространстве состояний
Создание линейных стационарных системных моделей с использованием передаточной функции или представлений в пространстве состояний. Управляйте ПИД-контроллерами и данными частотной характеристики. Модельные системы, которые являются SISO или MIMO, непрерывными или дискретными. Создавайте сложные блок-схемы, соединяя базовые модели последовательно, параллельно или с обратной связью.
Передаточные функции в MATLAB (4:15)
Моделирование системы управления с помощью объектов модели
Соединение моделей
Создание моделей с дискретным временем
Модели в пространстве состояний, часть 1: создание и анализ.
2:44 Продолжительность видео 2:44.
Модели в пространстве состояний, часть 1: создание и анализ
Дискретизация моделей
Используйте функции командной строки или интерактивные задачи Live Editor, чтобы передискретизировать модели динамических систем и преобразовывать модели между областями непрерывного и дискретного времени. Используйте удержание нулевого порядка, билинейный (Тастин), согласование с нулевым полюсом и другие методы преобразования скорости.
Дискретизация и передискретизация моделей
Дискретизация компенсатора
Дискретизация режекторного фильтра
Преобразование системы дискретного времени в непрерывное время
Изучите галерею (2 изображения)
Сокращение модели
Используйте приложение Model Reducer, задачу Live Editor или функции командной строки для интерактивного уменьшения порядка моделей объекта или контроллера при сохранении динамики, важной для вашего приложения. Используйте методы сбалансированного усечения, упрощения с нулевым полюсом или выбора режима.
Используйте методы сбалансированного усечения, упрощения с нулевым полюсом или выбора режима.
Уменьшите порядок моделей с помощью приложения Model Reducer
Сокращение модели сбалансированного усечения
Полюс-нулевое упрощение
Сокращение модели выбора режима
Сокращение порядка моделей с помощью приложения Model Reducer.4:57 Продолжительность видео 4:57.
Снижение порядка моделей с помощью приложения Model Reducer
Линейный анализ
Визуализация поведения системы во временной и частотной областях. Вычислите системные характеристики, такие как время нарастания, перерегулирование и время установления. Анализ стабильности системы.
Анализ во временной и частотной областях
Используйте приложение Linear System Analyzer для просмотра и сравнения временных и частотных характеристик нескольких моделей с использованием ступенчатой характеристики, импульсной характеристики, Боде, Николса, Найквиста, сингулярных значений и графиков с нулевым полюсом. Проверьте такие характеристики, как время нарастания, время установления и максимальный выброс.
Проверьте такие характеристики, как время нарастания, время установления и максимальный выброс.
Совместный анализ во временной и частотной областях
Характеристики во временной области на графиках отклика
Характеристики в частотной области на графиках отклика
Числовые значения характеристик системы во временной области
Передаточные функции в MATLAB.4:15 Продолжительность видео 4:15.
Передаточные функции в MATLAB
Анализ стабильности
Вычислите запас по усилению, запас по фазе и частоты кроссовера. Изучите положения полюсов и нулей динамических систем графически и численно. Вычислите коэффициент демпфирования, собственную частоту и постоянную времени полюсов линейной модели.
Оценка запасов по усилению и фазе
Полюс и ноль
Числовые значения характеристик частотной области модели SISO
Анализ систем управления с задержками
Вычисление запасов по усилению, запасов по фазе и частот кроссовера.
Пассивность и границы секторов
Вычисление различных мер пассивности для линейных стационарных систем. Анализируйте системы на пассивность и произвольные границы конического сектора.
Индексы пассивности
О границах секторов и индексах секторов
Абсолютная устойчивость квантованной системы
Контроль вибрации в гибкой балке
Изучить галерею (2 изображения)
ПИД-регулятор
Настройка усиления ПИД-регулятора с помощью инструментов автоматической и интерактивной настройки.
Настройка ПИД-регулятора
Используйте приложение PID Tuner, задачу Live Editor или функции командной строки для автоматической настройки коэффициентов усиления ПИД-регулятора, чтобы сбалансировать производительность и надежность. Задайте параметры настройки, такие как желаемое время отклика и запас по фазе. Настройте непрерывные или дискретные ПИД-регуляторы.
Проект ПИД-регулятора для быстрого отслеживания задания
Настройте ПИД-регулятор для поддержки отслеживания задания или подавления помех (ПИД-тюнер)
Проектирование каскадной системы управления с ПИ-контроллерами
Управление процессами с длительным временем простоя: предиктор Смита
Проект ПИД-регулятора с набором инструментов системы управления.
2:22 Продолжительность видео 2:22.
PID Control Design with Control System Toolbox
Интерактивная оценка динамики объекта
Создайте модель объекта на основе измеренных данных ввода-вывода непосредственно в приложении PID Tuner с помощью System Identification Toolbox™. В качестве альтернативы используйте Live Editor для определения динамики объекта и настройки ПИД-регулятора.
Интерактивный дизайн элементов управления с использованием задач Live Editor (4:56)
Интерактивная оценка параметров предприятия на основе данных ответов
Настройте ПИД-регулятор на основе измеренных данных предприятия с помощью задач Live Editor
Спроектируйте ПИД-регулятор, используя смоделированные данные ввода-вывода
Настройка ПИД-регулятора на основе измеренных входных-выходных данных.3:52 Продолжительность видео 3:52.
Настройка ПИД-регулятора на основе измеренных данных ввода-вывода
ПИД-регулятор с двумя степенями свободы
Настройка ПИД-регуляторов с двумя степенями свободы (2-DOF). Используйте ПИД-регулятор с 2 степенями свободы вместо ПИД-регулятора с 1 степенями свободы, чтобы добиться лучшего подавления возмущений без значительного увеличения перерегулирования при отслеживании уставки.
Используйте ПИД-регулятор с 2 степенями свободы вместо ПИД-регулятора с 1 степенями свободы, чтобы добиться лучшего подавления возмущений без значительного увеличения перерегулирования при отслеживании уставки.
Настройте ПИД-регулятор 2-DOF (ПИД-тюнер)
Настройка ПИД-регулятора 2-DOF (командная строка)
Типы ПИД-регуляторов для настройки
Многоконтурное ПИ-управление роботом-манипулятором
Настройка ПИД-регулятора с 2 степенями свободы (сплошная линия) и сравнение его с ПИД-регулятором с 1 степенями свободы (пунктирная линия) в приложении PID Tuner.
Разработка компенсатора
Интерактивное проектирование и анализ систем управления.
Интерактивное проектирование с корневым расположением и диаграммами Боде
Используйте приложение Control System Designer для интерактивного проектирования и анализа систем управления SISO. Графически настраивайте общие компоненты управления, такие как PID, сети опережения/запаздывания и режекторные фильтры, используя корневую траекторию, диаграммы Боде и диаграммы Николса.
Начало работы с Control System Designer
Схема диаграммы Боде
Дизайн корневого локуса
Николс Дизайн сюжета
Проектирование системы управления с помощью приложения Control System Designer.3:52 Продолжительность видео 3:52.
Проектирование системы управления с помощью приложения Control System Designer
Мониторинг реакции с обратной связью
Визуализируйте отклики замкнутого и разомкнутого контура с переходной характеристикой, графиками Найквиста и другими графиками, которые динамически обновляются по мере настройки контроллера. Укажите и оцените проектные требования во временной и частотной областях, такие как время нарастания, максимальный выброс, запас по усилению и запас по фазе.
Анализ проектов с использованием графиков отклика
Дизайн внутренней модели контроллера для завода с химическими реакторами
Проект компенсатора для набора моделей установок
Нелинейное управление объектом в различных рабочих точках.
4:22 Продолжительность видео 4:22.
Нелинейное управление предприятием в различных рабочих точках
Многоконтурная конструкция
Настройка контроллеров, состоящих из нескольких контуров SISO. Последовательно закрывайте циклы SISO, визуализируйте взаимодействие циклов и итеративно настраивайте каждый цикл для оптимизации общей производительности.
Разработка многоконтурной системы управления
Каскадная многоконтурная схема обратной связи
Посмотреть галерею (3 изображения)
Автоматическая настройка
Автоматическая настройка систем управления в соответствии с требованиями проектирования высокого уровня.
Контуры SISO и MIMO
Используйте приложение Control System Tuner или функции командной строки для моделирования и настройки архитектур систем управления SISO или MIMO с помощью простых настраиваемых элементов, таких как коэффициенты усиления, ПИД-регуляторы или фильтры младших разрядов. Совместная настройка нескольких контуров в многоконтурной системе управления.
Совместная настройка нескольких контуров в многоконтурной системе управления.
Настройте систему управления с помощью программы настройки системы управления
Цифровое управление напряжением силового каскада
Настройка многоконтурных систем управления
Управление перевернутым маятником на тележке
Автоматическая настройка системы управления полетом вертолета.4:56 Продолжительность видео 4:56.
Автоматическая настройка системы управления полетом вертолета
Цели во временной и частотной областях
Укажите и визуализируйте требования к настройке, такие как характеристики отслеживания, подавление помех, усиление шума, расположение полюсов с обратной связью и запасы устойчивости. Автоматически настраивайте параметры контроллера так, чтобы они удовлетворяли обязательным требованиям (конструктивным ограничениям) и наилучшим образом соответствовали оставшимся требованиям (целям).
Многоконтурное управление вертолетом
MIMO-управление дизельным двигателем
Автопилот с фиксированной конструкцией для пассажирского самолета
Оптимизация системы LTI для соответствия требованиям частотной области
Автоматическая настройка многопараметрического контроллера дистилляционной колонны.
5:04 Продолжительность видео 5:04.
Автоматическая настройка многопараметрического контроллера дистилляционной колонны
Настройка по набору моделей установок
Разработайте контроллер, устойчивый к изменениям в динамике установки из-за изменений параметров, изменений рабочих условий и отказов датчика или исполнительного механизма.
Настройка для нескольких значений параметров объекта
Отказоустойчивое управление пассажирским самолетом
Конструкция компенсатора для набора моделей установок
Мультимодельный дизайн управления
Разработка контроллера, устойчивого к изменениям параметров установки.
Планирование усиления
Разработка и настройка регуляторов усиления для нелинейных или изменяющихся во времени объектов.
Контроллеры с запланированным усилением в Simulink
Смоделируйте системы управления с запланированным усилением в Simulink ® , используя такие блоки, как переменный ПИД-регулятор, переменная передаточная функция, переменный режекторный фильтр и переменный фильтр нижних частот.
Моделируйте системы управления по расписанию усиления в Simulink
Реализуйте ПИД-регуляторы с запланированным усилением
Регулируемое усиление химического реактора
Управление угловой скоростью в автопилоте HL-20
Библиотека для моделирования регуляторов с регулируемым коэффициентом усиления в Simulink.
Настройка поверхности усиления
Автоматическая настройка коэффициентов поверхности усиления в соответствии с требованиями к производительности во всем рабочем диапазоне системы и достижение плавных переходов между рабочими точками. Укажите требования, которые зависят от условий эксплуатации. Проверьте результаты настройки во всем рабочем диапазоне вашей конструкции.
Проектное семейство ПИД-регуляторов для нескольких рабочих точек
Настройка трехконтурного автопилота с запланированным усилением
Рабочий процесс MATLAB для настройки автопилота HL-20
Изменение требований с рабочим условием
Получите планирование ПИД-регуляторов.
4:51 Продолжительность видео 4:51.
Планирование усиления ПИД-регуляторов
Оценка состояния и проектирование LQG
Используйте методы проектирования управления в пространстве состояний, такие как LQG/LQR и алгоритмы размещения полюсов. Наблюдатели проектирования, включая линейные и нелинейные фильтры Калмана.
LQR/LQG и размещение полюсов
Разработка непрерывных и дискретных линейно-квадратичных регуляторов (LQR) и линейно-квадратично-гауссовских (LQG) регуляторов. Вычислите матрицы усиления обратной связи, чтобы разместить полюса с обратной связью в нужных местах.
Пространство состояний, часть 4: что такое оптимальное управление LQR? (17:23)
Управление двигателем постоянного тока
Контроль толщины стальной балки
Государственное пространство, часть 2: размещение полюса (14:54)
Модели в пространстве состояний, часть 2: проектирование элементов управления. 5:57
Продолжительность видео 5:57.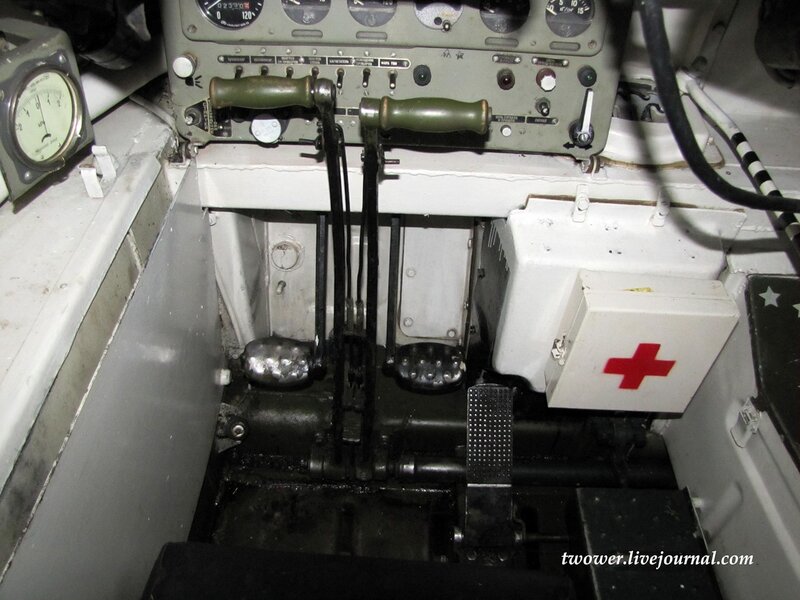
Модели в пространстве состояний, часть 2: проектирование систем управления
Фильтры Калмана
Разработка и моделирование линейных стационарных и изменяющихся во времени фильтров Калмана. Сгенерируйте код C/C++ для этих фильтров, используя MATLAB Coder™ и Simulink Coder™.
Конструкция фильтра Калмана
Оценка состояния с использованием изменяющегося во времени фильтра Калмана
Понимание фильтров Калмана, часть 6: как использовать фильтр Калмана в Simulink.8:58 Продолжительность видео 8:58.
Понимание фильтров Калмана, часть 6: как использовать фильтр Калмана в Simulink
Nonlinear State Estimators
Оценка состояний нелинейных систем с использованием расширенных фильтров Калмана, фильтров Калмана без запаха или фильтров частиц в MATLAB ® и Simulink. Сгенерируйте код C/C++ для этих фильтров с помощью MATLAB Coder и Simulink Coder.
Нелинейная оценка состояния с использованием фильтра Калмана без запаха и фильтра частиц
Оценка состояний нелинейной системы с несколькими многоскоростными датчиками
Оценка параметра и состояния в Simulink Используя блок фильтра частиц
Понимание фильтров Калмана, часть 7: как использовать расширенный фильтр Калмана в Simulink.
5:34 Продолжительность видео 5:34.
Понимание фильтров Калмана, часть 7: как использовать расширенный фильтр Калмана в Simulink
Проектирование управления в Simulink
Анализ и настройка систем управления, смоделированных в Simulink.
Линейный анализ
Используйте инструмент линейного анализа в Simulink Control Design™ для линеаризации моделей Simulink. Вычислите временные и частотные характеристики линеаризованных моделей, используя переходную характеристику, импульсную характеристику, Боде, Николса, Найквиста, сингулярное значение и графики с нулевым полюсом.
Линеаризуйте модель Simulink в рабочей точке модели
Обрезка и линеаризация планера
Линеаризация пневматической системы на моментальных снимках моделирования
Пакетная линеаризация модели для изменений значений параметров с использованием инструмента линейного анализа
Обрезка и линеаризация в пакетном режиме.
5:20 Продолжительность видео 5:20.
Обрезка и линеаризация в пакетном режиме
Compensator Design
Графически настройте контуры обратной связи SISO, смоделированные в Simulink, с помощью Simulink Control Design. Создавайте контроллеры с помощью интерактивных графических редакторов Bode, root locus и Nichols для добавления, изменения и удаления полюсов контроллера, нулей и коэффициентов усиления.
Контрольное отслеживание двигателя постоянного тока с изменениями параметров
Одноконтурный компенсатор обратной связи/предфильтра
Спроектируйте компенсатор с помощью автоматизированной настройки ПИД-регулятора и графического дизайна Боде
Триммер, линеаризация и дизайн управления для самолета.4:32 Продолжительность видео 4:32.
Обрезка, линеаризация и проектирование управления для самолета
Настройка компенсатора
Автоматическая настройка усиления ПИД-регуляторов, смоделированных в Simulink. Используйте приложение Control System Tuner или инструменты командной строки в Simulink Control Design для автоматической настройки усиления и динамики элементов управления, распределенных по любому количеству контуров обратной связи в Simulink.
Используйте приложение Control System Tuner или инструменты командной строки в Simulink Control Design для автоматической настройки усиления и динамики элементов управления, распределенных по любому количеству контуров обратной связи в Simulink.
Контрольное отслеживание двигателя постоянного тока с изменением параметров (3:53)
Настройка ПИД-регулятора в Simulink
Настройте ориентированные на поле контроллеры с помощью SYSTUNE
Настройка многоконтурных систем управления
Автоматическая настройка многоконтурного контроллера двигателя постоянного тока.2:47 Продолжительность видео 2:47.
Автоматическая настройка многоконтурного контроллера двигателя постоянного тока
Ресурсы продукта:
Документация Примеры Функции Блоки Технические статьи Истории пользователей Требования к продукту Примечания к выпуску Видео и вебинары
Что дальше?
Бесплатные примеры
Примеры настройки ПИД-регулятора и код
Бесплатные примеры
Спроектируйте и симулируйте алгоритмы фильтра Калмана
Особенности выпуска
Что нового в последней версии MATLAB и Simulink
Выберите сеть Сайт
Выберите веб-сайт, чтобы получить переведенный контент, где он доступен, и посмотреть местные события и
предложения. На основе
ваше местоположение, мы рекомендуем вам выбрать: .
На основе
ваше местоположение, мы рекомендуем вам выбрать: .
Вы также можете выбрать веб-сайт из следующего списка:
Европа
Свяжитесь с местным офисом
Системы управления — решения MATLAB и Simulink
Инженеры по системам управления используют MATLAB ® и Simulink ® на всех этапах разработки — от моделирования предприятия до проектирования и настройки алгоритмов управления и логики диспетчеризации, вплоть до развертывания с помощью автоматического кода генерация и проверка системы, валидация и тестирование. MATLAB и Simulink предлагают:
- Многодоменная среда блок-схем для моделирования динамики предприятия, разработки алгоритмов управления и запуска симуляций с обратной связью
- Моделирование предприятия с использованием средств идентификации системы или физического моделирования
- Готовые функции и интерактивные инструменты для анализа перерегулирования, времени нарастания, запаса по фазе, запаса по усилению и других характеристик производительности и стабильности во временной и частотной областях
- Корневая геометрия, диаграммы Боде, LQR, LQG, робастное управление, управление с прогнозированием моделей и другие методы проектирования и анализа
- Автоматическая настройка ПИД-регулирования, систем управления с заданным коэффициентом усиления и произвольных систем управления SISO и MIMO
- Моделирование, разработка и имитация логики диспетчерского управления для выполнения планирования, переключения режимов, обнаружения, изоляции и восстановления сбоев (FDIR)
11:30 Продолжительность видео 11:30.
Начало работы с Simulink для элементов управления
Использование MATLAB для систем управления
Начало работы с Simulink для элементов управления.11:30 Продолжительность видео 11:30.
Начало работы с Simulink для элементов управления
Модельно-ориентированное проектирование систем управления.43:09 Продолжительность видео 43:09.
Модельно-ориентированное проектирование систем управления
Ускорение темпов и масштабов проектирования систем управления.51:03 Продолжительность видео 51:03.
Ускорение темпов и масштабов проектирования систем управления
Моделирование и имитация динамики предприятия
Используйте MATLAB и Simulink для построения точных моделей предприятия. Опишите сложную динамику вашего предприятия, используя различные поддерживаемые подходы к моделированию, и используйте наиболее подходящий подход для каждого компонента вашего предприятия, чтобы создать модель предприятия на уровне системы.
Оцените динамику предприятия по входным и выходным данным, используя системную идентификацию, если вы не знаете подробную структуру модели. В качестве альтернативы можно создавать сложные многодоменные модели объекта без необходимости выведения базовых уравнений из первых принципов с помощью инструментов физического моделирования. Используйте блоки, представляющие механические, электрические, магнитные, гидравлические, пневматические и тепловые компоненты, чтобы отобразить топографию компонентов и физические соединения вашей системы.
Подробнее
- Что такое System Identification Toolbox? (2:46)
- Начало работы с Simscape (8:05)
- ESA и Airbus создают платформу разработки верхнего уровня управления ориентацией с использованием проектирования на основе моделей
Посмотреть продукты
- Simulink
- System Identification Toolbox™
- Simscape™
Проектирование и настройка компенсаторов обратной связи
Анализ и разработка компенсаторов с обратной связью, а также оценка ключевых рабочих параметров, таких как перерегулирование, время нарастания и запасы устойчивости. Обрежьте и линеаризуйте нелинейные модели Simulink. Вы также можете моделировать и анализировать влияние неопределенности на производительность и стабильность ваших моделей.
Обрежьте и линеаризуйте нелинейные модели Simulink. Вы также можете моделировать и анализировать влияние неопределенности на производительность и стабильность ваших моделей.
Воспользуйтесь диаграммами Боде, корневым вектором и другими методами проектирования линейного управления и автоматически настраивайте ПИД-регуляторы в имитационной модели или на испытательном оборудовании. Готовые инструменты позволяют автоматически настраивать децентрализованные многопараметрические контроллеры и использовать передовые стратегии управления, такие как управление с прогнозированием моделей и надежное управление. Используйте методы оптимизации, чтобы вычислить усиления контроллера, чтобы соответствовать ограничениям времени нарастания и перерегулирования.
Узнать больше
- Проект ПИД-регулятора в Simulink (3:53)
- Проектирование системы управления с помощью приложения Control System Designer (3:52)
- Встроенный автотюнер PID (6:35)
- Автоматическая настройка системы управления полетом вертолета (4:56)
- Три способа ускорить работу контроллеров прогнозирования моделей (технический документ)
Обзор продуктов
- Control System Toolbox™
- Simulink Control Design™
- Набор инструментов для надежного управления™
- Simulink Design Optimization™
- Model Predictive Control Toolbox™
Проектирование и моделирование логики диспетчерского управления
Используйте Stateflow ® для моделирования, проектирования и имитации логики диспетчерского управления в вашей системе управления, которая планирует работу контроллера, управляет рабочим режимом системы и выполняет обнаружение неисправностей, изоляция и восстановление (FDIR).
Используйте графический редактор для построения логики в виде конечного автомата или блок-схемы. Вы также можете комбинировать графические и табличные представления, включая диаграммы перехода состояний, блок-схемы, таблицы перехода состояний и таблицы истинности, чтобы моделировать реакцию вашей системы на события, временные условия и внешние входные сигналы. Визуализируйте поведение системы во время моделирования, используя анимацию диаграммы состояний, чтобы выделить активные состояния и переходы в вашей модели.
Узнать больше
- Что такое Stateflow? (2:06)
- Моделирование автоматической коробки передач и контроллера (3:17)
- Использование конечных автоматов, часть 1: диспетчерское управление (3:16)
Обзор продуктов
- Stateflow
Развертывание проектов во встроенных контроллерах
После разработки алгоритмов системы управления их можно уточнить для реализации.