Что такое мышь и как она устроена
Добрый день, друзья!
Сегодня мы поговорим об одном очень удобном устройстве, к которому мы так привыкли и без которого уже не представляем работы на компьютере.
Что такое «мышь»?
«Мышь» — это кнопочный манипулятор, предназначенный вместе с клавиатурой для ввода информации в компьютер.
Действительно, он похож на мышь с хвостиком. Современный компьютер уже немыслим без этой штуковины.
«Мышью» пользоваться гораздо удобнее, чем, например, встроенным манипулятором ноутбука.
Поэтому частенько пользователи отключают это ноутбучный «коврик» и подключают «мышь».
Как же устроена эта удобная штука?
Первые конструкции манипуляторов
Первые манипуляторы включали в себя шарик, который касался двух валиков с дисками.
Внешний обод каждого диска имел перфорацию. Валы были расположены перпендикулярно друг к другу.
Один вал отвечал за координату Х (горизонтальное перемещение), другой – за координату Y (вертикальное перемещение).
При перемещении манипулятора по столу шарик вращался, передавая крутящий момент на валы.
Если перемещение манипулятора выполнялось в направлении «вправо-влево», то вращался преимущественно вал, отвечающий за координату Х. Курсор на экране монитора перемещался также вправо-влево. Если мышь перемещалась в направлении «к себе-от себя», вращался преимущественно вал, отвечающий за координату Y. Курсор на экране монитора перемещался вверх-вниз.
Если манипулятор перемешался в произвольном направлении, вращались оба вала, соответственно перемещался и курсор.
Оптические датчики в старых «мышах»
Такие устройства содержали в себе два оптических датчика – оптопары. Оптопара включает в себя излучатель (светодиод, излучающий в ИК диапазоне) и приемник – (фотодиод или фототранзистор). Излучатель и приемник расположены на близком расстоянии друг от друга.
При движении манипулятора вращаются валы с жестко закрепленными на них дисками. Перфорированный край диска периодически пересекает поток излучения от излучателя к приемнику. В итоге на выходе приемника получается серия импульсов, которая поступает на микросхему-контроллер. Чем быстрее будет перемещаться мышь, тем быстрее будут вращаться валы. Будет большей частота импульсов, и быстрее будет перемещаться курсор по экрану монитора.
В итоге на выходе приемника получается серия импульсов, которая поступает на микросхему-контроллер. Чем быстрее будет перемещаться мышь, тем быстрее будут вращаться валы. Будет большей частота импульсов, и быстрее будет перемещаться курсор по экрану монитора.
Кнопки и колесо прокрутки
Любой манипулятор имеет, как минимум, две кнопки.
Двойной «клик» (нажатие) на одну из них (обычно левую) запускает исполнение программы или файла, нажатие на другую – запускает контекстное меню для соответствующей ситуации.
Устройства, предназначенные для компьютерных игр, могут иметь 5-8 кнопок.
Нажав на одну из них, можно пальнуть в монстра из гранатомета, на другую – пустить ракету, на третью – разрядить в него добрый старый винчестер.
Современные мыши имеют в себе и scroll – колесико прокрутки, что очень удобно при просмотре объемного документа. Просматривать такой документ можно, только вращая колесико и не используя кнопки. Некоторые модели имеют два колеса прокрутки, при этом можно просматривать текст или графическое изображение перемещаясь как вверх-вниз, так и влево-вправо.
Под колесиком прокрутки обычно имеется еще одна кнопка. Если, просматривать документ, вращая колесико и одновременно нажать на него, драйвер манипулятора подключает такой режим, что документ сам начинает перемещаться вверх по экрану. Скорость перемещения зависит от того, с какой скорость пользователь вращал колесико до нажатия на него.
В таком режиме курсор изменяет свое начертание. Это еще более повышает удобство… Короче говоря, добыли, приготовили, разжевали, осталось только проглотить. Повторное нажатие на колесико осуществляет переход от «автопросмотра» в обычный режим.
Оптические «мыши»
В дальнейшем манипулятор был усовершенствован.
Появились так называемые оптические «мыши».
Такие устройства содержат излучающий светодиод (обычно красного цвета), прозрачную отражающую призму из пластика, светочувствительный сенсор и управляющий контроллер.
Светодиод испускает лучи, которые, отражаясь от поверхности, улавливаются сенсором.
При движении манипулятора поток принятого излучения меняется, что улавливается сенсором и передается контроллеру, который вырабатывает стандартные сигналы для конкретного интерфейса. Оптическая мышь более чувствительна к перемещению и не требует для себя коврика, как старый манипулятор с шариком.
Оптическая мышь более чувствительна к перемещению и не требует для себя коврика, как старый манипулятор с шариком.
В оптической «мыши» нет трущихся частей (за исключением потенциометра, вращение на который передается с колеса прокрутки), которые изнашиваются или загрязняются. Это также является преимуществом.
Возможные проблемы с манипуляторами
Манипулятор «мышь», как и любая техника, имеет ограниченный срок службы. Ни для кого не секрет, что основная часть компьютерной техники делается в Китае. Цель любого бизнеса – это прибыль, поэтому китайские товарищи экономят даже на кабелях для «мышей», максимально утончая их.
Поэтому первое слабое место у манипуляторов – именно кабель.
Чаще всего внутренний обрыв одной или нескольких жил бывает в месте входа кабеля в мышь.
В кабеле имеется 4 провода, два из них – питание, третий – тактовая частота, четвертый – информационный.
Если мышь не видится компьютером, первым делом надо «позвонить» кабель тестером.
Если обнаружен обрыв, следует отрезать часть кабеля с разъемом (за местом входа кабеля в корпус «мыши» ближе к разъему) и припаять оставшийся кусок к печатной плате манипулятора, соблюдая, естественно, расцветку.
Мыши с разъемом PS/2 нельзя переключать «на ходу».
В противном случае ее контроллер (крохотный ее «мозг») может выйти из строя. И хорошо еще, если дело ограничится только этим. Может выйти из строя и контроллер интерфейса PS/2 на материнской плате, что гораздо хуже.
Если кабель цел, а мышь не опознается контроллером, то, скорее всего, вышел из строя ее контроллер, и она подлежит замене. Обрыв кабеля у оптических мышей можно заподозрить и по отсутствию свечения светодиода (который расположен вблизи поверхности, которая ездит по столу). В других случаях свечения может не быть из-за неисправности светодиода или контроллера, но такое бывает редко.
Манипуляторы с интерфейсом COM или USB можно переключать «на ходу». Впрочем, в настоящее время устройства с интерфейсом COM практически не встречаются.
«Кликать» мышкой приходится многие тысячи раз, и кнопки после длительной работы могут отказывать. Чтобы заменить кнопку, надо разобрать манипулятор и припаять другую. Не обязательно использовать такую же, какая была. Главное здесь – соблюсти высоту, чтобы сохранить длину хода клавиши. Впрочем, манипуляторы давно уже весьма доступны, и большинство пользователей не заморачиваются с их ремонтом.
Скажем «спасибо» добрым старым «мышкам» с шариком в брюхе – они хорошо нам послужили…
Заканчивая статью, отметим, что существуют разновидности манипуляторов с лазерным излучателем вместо светодиода, которые обеспечивают более точное и быстрое позиционирование курсора. Эти скорость и точность особенно востребованы в играх.
Существуют и wireless (радио) «мыши», в которых обмен информацией с компьютером осуществляется не по проводу, а по радиоканалу. Поэтому они содержат собственный источник питания – пару пальчиковых гальванических элементов типоразмера АА или ААА. Напомним еще раз, что разъем манипулятора вставляется в один из портов материнской платы.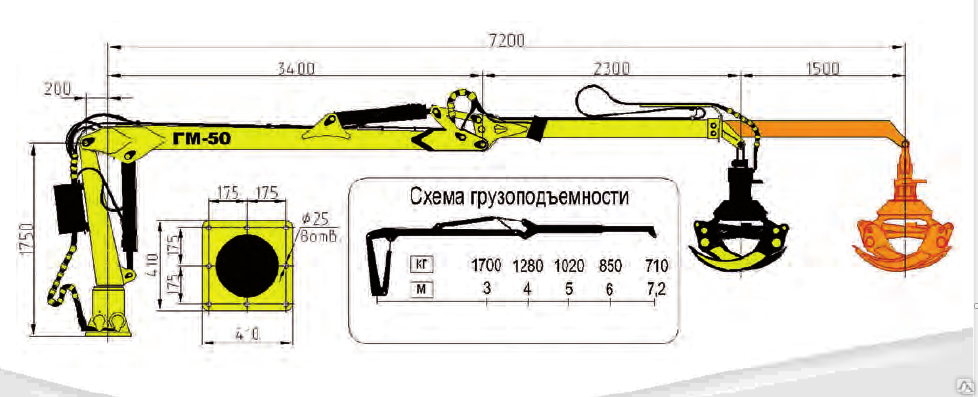
На сегодня все.
До встречи на блоге!
Устройство манипулятора | Принцип работы кран-манипулятора
Статьи
Кран-манипулятор общее устройство и принципы работы механизмов
В этой статье будет рассказано про устройство и принцип работы манипулятора. Какие запчасти для манипуляторов требуется возить с собой при эксплуатации и работе, чтобы не попасть в неприятную ситуацию. Из чего состоит сама установка манипулятора.
Принцип работы манипулятора
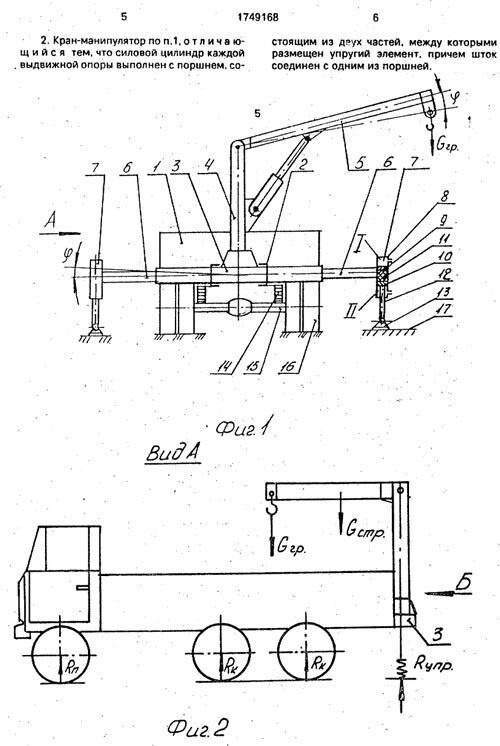
Вся работа начинается только после того, как будет запушен ДВС автомобиля на платформе которого установлен кран-манипулятор, далее через КПП авто вращение передается на коробку отбора мощности, приводящая в движение насос НШ, который перемещает гидравлическую жидкость.
- Гидравлический насос (НШ) производит забор масла из масляного бака, создает давление и передает его на распределитель, затем через обратку, фильтр сливается обратно в бак.

- Гидрораспределитель – распределяет поток гидравлической жидкости дальше по системе, в гидроцилиндры либо в гидромоторы, происходит это по средствам перемещения рычагов управления влево, вправо либо вверх, вниз (в зависимости от модели манипулятора).
- Жидкость поступает в гидромоторы, которых обычно установлено два на автомобиле – первый на поворот стрелы, второй на лебёдку.
А. Гидромотор на поворот стрелы – это устройство, которое создает вращательное движение. Вал насоса вращает поворотный редуктор, из которого выходит вал-шестерня и далее к венцу прикреплена установка.
Б. Второй гидромотор стоит в самой станине, передает крутящий момент на лебёдку, где трос либо поднимает, либо опускает груз.
4. Гидроцилиндры – на манипуляторе, как правило, установлено 4 штуки:
2 ставят на аутригер, 2 на подъем стрелы и 1 на выдвижение стрелы (спрятан внутри самой стрелы). Принцип работы цилиндров разъяснять не будем в этой статье, он общий для всех.
Устройство манипулятора
1. Стрела. Обеспечивает перемещение груза в рабочей зоне. Выдвигается и задвигается с помощью гидроцилиндров. | 11. Рычаг управления телескопированием стрелы. Управляет гидроцилиндрами, позволяя выдвигать и складывать стрелу. |
2. Поворотная колонна. Это вертикальная часть крановой установки, на которой установлена стрела, грузовая лебедка, и гидроцилиндр изменения угла наклона стрелы. Колонна поворачивается поворотным механизмом. | 12. Рычаг управления поворотом колонны. Управляет гидромотором поворота колонны, позволяя КМУ совершать вращательные движения вокруг своей оси. |
3. Основание КМУ. Устанавливается на раму автомобиля. | 13. Рычаги управления аутригерами. Управляют выдвижением и втягиванием аутригеров. |
4. Грузовая лебедка. Посредством гидромотора поднимает и опускает груз с помощью каната. | 14. Рычаги управления аутригерами. Управляют выдвижением и втягиванием аутригеров. |
5. Поворотный механизм. Поворачивает колонну посредством гидромотора. | 15. Крюк. Для закрепления груза. |
6. Гидроцилиндр подъема. Поднимает и опускает стрелу. | 16. Рычаг акселератора. Предназначен для регулировки оборотов двигателя. |
7. Гидроцилиндр телескопирования. Выдвигает и втягивает секции стрелы. | 17. Предупредительный сигнал. При нажатии кнопки звукового сигнала, включается звуковой сигнал автомобиля. Предназначен для предупреждения людей, находящихся в зоне работы. |
8. Аутригеры (выносные опоры). Аутригеры поддерживают кран-манипулятор в устойчивом положении во время работы. | 18. Грузовой канат. Предназначен для поднятия груза. |
9. Рычаг управления изменением угла наклона стрелы. Предназначен для изменения угла наклона стрелы. | 19. Индикатор грузоподъемности. Показывает вес поднимаемого груза. |
10. Рычаг управления грузовой лебёдкой. Управляет лебёдкой, позволяя поднимать и опускать крюк. |
|

Какие запчасти желательно возить с собой водителя крана-манипулятора?
Манипулятор сам по себе достаточно надежное устройство и каких то дополнительных запчастей при эксплуатации возить не требуется, разве что порвется шланг РВД или еще какая поломка, но это очень трудно починить по месту работы. Можно положить с собой для уверенной работы дополнительный комплект строп, на случай обрыва, гидравлическую жидкость, если подтекают цилиндры или соединения.
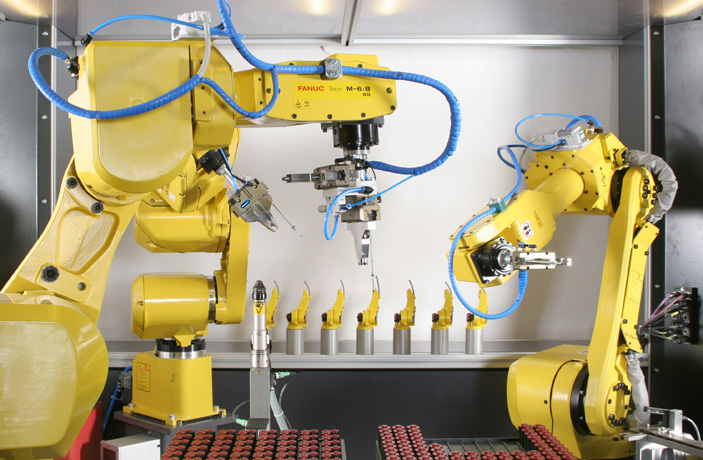
Отличия между роботом-манипулятором и роботом-манипулятором
Источник: Pinterest К ним относятся контроллеры, концевые эффекторы, приводы, датчики и роботы-манипуляторы. Каждая из этих частей играет уникальную роль в поддержке друг друга. Из всех них роботы-манипуляторы также могут быть одним из наиболее важных компонентов роботизированной структуры. Мы подробно рассмотрим, что такое роботы-манипуляторы, какие роли они выполняют, и сравним их с обычными роботами-манипуляторами, чтобы увидеть, как они противостоят друг другу.
Из всех них роботы-манипуляторы также могут быть одним из наиболее важных компонентов роботизированной структуры. Мы подробно рассмотрим, что такое роботы-манипуляторы, какие роли они выполняют, и сравним их с обычными роботами-манипуляторами, чтобы увидеть, как они противостоят друг другу.
Содержание
Что такое робот-манипулятор?
Роботизированный манипулятор — это устройство, которое используется для манипулирования материалами без какого-либо прямого физического контакта со стороны человека, управляющего их работой. Они были изобретены, чтобы упростить роботам работу с радиоактивными и биологически опасными материалами, что требовало от людей держаться на приличном расстоянии, чтобы избежать воздействия. Но со временем этот принцип был перенесен на современные роботы-манипуляторы, что сделало управление намного проще и гибче.
Некоторые из современных ролей, которые они использовали, включают сварку, роботизированную хирургию и космические станции. Сам манипулятор имеет форму руки и поставляется в комплекте с сегментами, называемыми поперечными направляющими, которые могут скользить друг по другу, надежно захватывая объекты. Это дает им дополнительную свободу движений, чего не хватает большинству обычных роботов-манипуляторов.
Сам манипулятор имеет форму руки и поставляется в комплекте с сегментами, называемыми поперечными направляющими, которые могут скользить друг по другу, надежно захватывая объекты. Это дает им дополнительную свободу движений, чего не хватает большинству обычных роботов-манипуляторов.
На крупномасштабном производстве робот-манипулятор используется для интенсивных задач, таких как поднятие тяжестей, которые в противном случае потребовали бы слишком много работы для людей. Они также удобны для размещения грузов в упорядоченную кучу, которая может достигать высоты целого склада благодаря выдвижным романтическим рычагам. Их гибкость делает их идеальным инструментом для протискивания в ограниченном пространстве, и это одна из причин, почему многие роботы, которые используются в области медицины, используют роботов-манипуляторов во всех своих задачах, поскольку они более точны и точны с малейшими дефектами. вероятность разрушения других органов тела.
Типы роботов-манипуляторов
Существуют различные типы роботов-манипуляторов, которые активно используются во всех формах производства, особенно на сборочных предприятиях. Эти манипуляторы бывают разных размеров, но все они работают по одному и тому же принципу. Следует отметить суставы, из которых состоят эти манипуляторы. Это детали, которые делают движение более гибким, и они бывают двух типов, включая следующие.
Эти манипуляторы бывают разных размеров, но все они работают по одному и тому же принципу. Следует отметить суставы, из которых состоят эти манипуляторы. Это детали, которые делают движение более гибким, и они бывают двух типов, включая следующие.
Поворотный шарнир: Это роботизированные шарниры-манипуляторы, которые имеют одну степень свободы с движениями, которые можно описать как вращательные. Их конфигурация состоит из одного значения, которое представляет собой количество оборотов, когда они работают.
Призматическое соединение: Это соединения, которые можно описать как поступательные, так как это движение, которое они отображают при перемещении между объектами. Они представлены одним градусом поступательного движения вдоль своей оси, когда они находятся в рабочем состоянии.
После очистки соединений, которые являются обычными в промышленных манипуляторах, ниже приведены некоторые из известных роботов манипуляторного типа, которые используются в производственном процессе с различной производительностью.
Робот с декартовыми координатами
Источник: Pinterest
Этот промышленный робот использует манипулятор с призматическим соединением и лучше всего подходит для таких задач, как дозирование клея в автомобилестроении. Этот робот имеет возможность двигаться в линейных направлениях, и это одно из его самых больших преимуществ, поскольку они быстрые, точные и обеспечивают манипуляторам прямую линию работы, которая обеспечивает однородность выполняемой ими работы от первого продукта до конечного продукта. последний. Они также являются одними из самых простых для программирования роботов манипуляторного типа, поскольку их движения более определены вдоль одной линии траектории. Единственным недостатком является то, что они занимают слишком много места, но редко используют большую его часть. Это затрудняет их работу вместе с другими роботами-манипуляторами и людьми.
Робот SCARA
Роботы SCARA — одни из самых популярных промышленных роботов, в настройке которых используются роботизированные манипуляторы. Аббревиатура от Selective Compliance Assembly Robot Arm, они демонстрируют движения, очень похожие на движения человеческой руки. Они идут в комплекте с плечом, локтевым суставом и запястьем, которые могут совершать вертикальные движения. Они также используют призматический шарнир для своих гибких движений и очень быстры по сравнению с другими типами манипуляторов роботов-манипуляторов.
Аббревиатура от Selective Compliance Assembly Robot Arm, они демонстрируют движения, очень похожие на движения человеческой руки. Они идут в комплекте с плечом, локтевым суставом и запястьем, которые могут совершать вертикальные движения. Они также используют призматический шарнир для своих гибких движений и очень быстры по сравнению с другими типами манипуляторов роботов-манипуляторов.
Роботы SCARA также долговечны и очень прочны; это позволяет им выполнять самые сложные виды работ, требующие сочетания высокой скорости и точности. Они также идеально подходят для повторяющихся задач, и именно поэтому они используются для укладки на поддоны, загрузки машин и сборки. Единственным недостатком манипуляторов, используемых в роботах SCARA, является то, что они не гибкие, а их движения ограничены.
Цилиндрический робот
Источник: www.industrial-electronics.com
Это промышленный робот-манипулятор, который перемещается вокруг столба в форме цилиндра. Он имеет три оси движения; один круговой и два линейных, которые придают руке гибкие горизонтальные и вертикальные движения. В отличие от большинства других роботов-манипуляторов, цилиндрический робот имеет три шарнира; шарнирное соединение, призматическое соединение и цилиндрическое соединение. Эти роботы почти так же быстры, как роботов-манипуляторов SCARA , и по этой причине они используются в быстро меняющихся условиях, таких как сбор и размещение, захват и удержание, среди многих других сложных задач. Его преимущества перед декартовым роботом заключаются в том, что он может двигаться быстрее и в большем количестве направлений, а также может эффективно использовать пространство вокруг себя, что лучше, чем у робота SCARA.
В отличие от большинства других роботов-манипуляторов, цилиндрический робот имеет три шарнира; шарнирное соединение, призматическое соединение и цилиндрическое соединение. Эти роботы почти так же быстры, как роботов-манипуляторов SCARA , и по этой причине они используются в быстро меняющихся условиях, таких как сбор и размещение, захват и удержание, среди многих других сложных задач. Его преимущества перед декартовым роботом заключаются в том, что он может двигаться быстрее и в большем количестве направлений, а также может эффективно использовать пространство вокруг себя, что лучше, чем у робота SCARA.
Роботы PUMA
Источник: grabcad.com
Программируемая универсальная сборочная машина (PUMA) — один из наиболее часто используемых промышленных роботов, которые можно найти в сборочных и сварочных операциях, требующих ручного подхода. Робот имеет схожую конструкцию с человеческой рукой, и его легко спутать с роботом SCARA , так как манипулятор выглядит почти так же.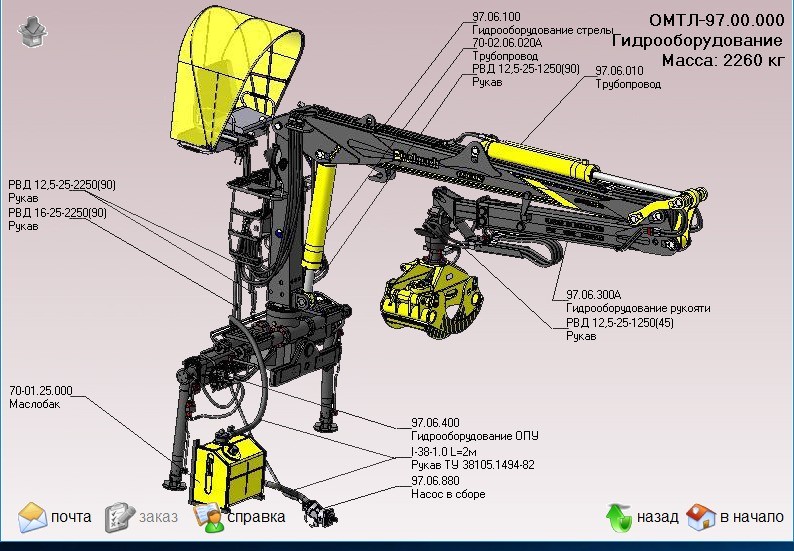 Единственная разница, которая отличает их друг от друга, заключается в том, что PUMA более гибкая, но ей не хватает точности, характерной для роботов SCARA. Тем не менее, эти роботы по-прежнему используются для выполнения быстро меняющихся задач, требующих соблюдения как скорости, так и точности. Он имеет три вращающихся шарнира, что делает PUMA совместимым со всеми тремя осями. Единственным недостатком этого типа роботов является то, что ему не хватает точности для решения критических задач, но он все же полезен для других задач, которые не так интенсивны.
Единственная разница, которая отличает их друг от друга, заключается в том, что PUMA более гибкая, но ей не хватает точности, характерной для роботов SCARA. Тем не менее, эти роботы по-прежнему используются для выполнения быстро меняющихся задач, требующих соблюдения как скорости, так и точности. Он имеет три вращающихся шарнира, что делает PUMA совместимым со всеми тремя осями. Единственным недостатком этого типа роботов является то, что ему не хватает точности для решения критических задач, но он все же полезен для других задач, которые не так интенсивны.
Полярные роботы
Источник: blog.technavio.com
Последний тип роботов-манипуляторов — это полярные роботы, также известные как сферические роботы; это стационарные машины, у которых рычаги поддерживаются сферическими рабочими оболочками. Их конструкция сложнее, чем у большинства других роботов в этом списке; у них есть пара вращающихся шарниров, которые работают вместе с призматическим шарниром. Роботы Polar используются для погрузочно-разгрузочных операций, таких как сбор и укладка и укладка на поддоны, среди других повторяющихся задач.
Использование роботов-манипуляторов
Источник: Pinterest
Добавление робота-манипулятора к роботу-манипулятору выполняет ряд функций. Как уже упоминалось, они гибкие, более быстрые, могут протискиваться через небольшие пространства и очень эффективны для повторяющихся задач, требующих высокой точности. Ниже приведены некоторые из применений, для которых они лучше всего подходят.
Автомобильная сборка: Тяжелые детали, которые используются в производстве автомобилей, требуют роботизированных рук значительной силы и хорошего захвата, что могут обеспечить манипуляторы. Их гибкие движения во всех направлениях также значительно облегчают такие задачи, как покраска распылением, поскольку весь корпус автомобиля можно быстро повернуть, чтобы покрыть все детали.
Хирургические процессы: Автоматизированная хирургия — очень деликатная процедура, требующая высочайшей точности, поскольку на карту поставлена человеческая жизнь. Медицинские роботы, как правило, небольшие, но для более точной работы им требуются манипуляторы меньшего размера, быстрые и способные быстро протиснуться в любую маленькую щель, не усугубляя ситуацию.
Медицинские роботы, как правило, небольшие, но для более точной работы им требуются манипуляторы меньшего размера, быстрые и способные быстро протиснуться в любую маленькую щель, не усугубляя ситуацию.
Сварочные манипуляторы: Промышленная сварка производит много тепла, и это может быть слишком много для человека, работающего на близком расстоянии. Вот где робот 9Сварочный манипулятор 0005 удобен тем, что им можно управлять на расстоянии без ущерба для его точности, скорости и эффективности.
Pick and Place : Загрузка и разгрузка тяжелых материалов являются частью производственного процесса, и наличие подходящих роботов — это все, что вам нужно, чтобы цепь никоим образом не разорвалась. Манипуляторы имеют самые гибкие концевые исполнительные органы и поддерживаются сильными роботизированными руками, способными захватывать тяжелые грузы и размещать их упорядоченным образом.
Покрасочный робот: Роботизированная покраска — это еще один процесс, который зависит от точности, чтобы гарантировать, что каждый наносимый слой будет однородным по всей поверхности. Единственный способ сделать это должным образом — использовать роботов-манипуляторов, которыми легко управлять и программировать.
Единственный способ сделать это должным образом — использовать роботов-манипуляторов, которыми легко управлять и программировать.
Заключение
Роботизированные манипуляторы все чаще находят применение в производственных помещениях благодаря своей надежности. Они являются следующим уровнем эволюции для 9промышленные роботы 0005, и любой, кто хочет автоматизировать свои процессы, должен принять их или остаться позади. Для получения дополнительной информации о роботизированных руках и манипуляторах посетите наш веб-сайт при первой же возможности и изучите все ресурсы, которые будут доступны для вашего использования.
Роботизированный манипулятор Определение Детали Применение
Роботизированный манипулятор представляет собой устройство нового типа, разработанное в процессе механизации и автоматизации. В зависимости от режима движения их можно разделить на гидравлические, пневматические, электрические и механические.
Особенность заключается в том, что его можно запрограммировать на выполнение различных ожидаемых операций, а структура и производительность имеют преимущества как человека, так и робота.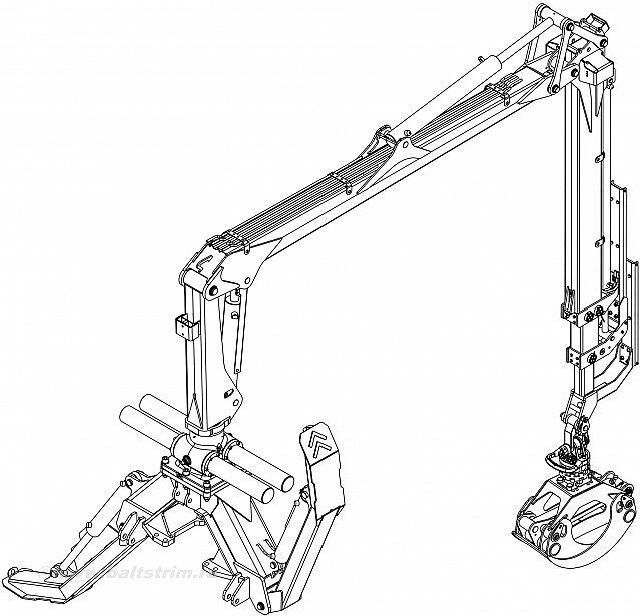 Это может сэкономить рабочих, повысить эффективность, снизить затраты, улучшить качество продукции, повысить безопасность и улучшить имидж фабрики.
Это может сэкономить рабочих, повысить эффективность, снизить затраты, улучшить качество продукции, повысить безопасность и улучшить имидж фабрики.
Определение:
Манипулятор – это автоматическое операционное устройство, которое может имитировать определенные действия рук и рук человека для захвата, переноски предметов или работы с инструментами в соответствии с установленной программой.
Отличительной особенностью является то, что различные ожидаемые задания могут выполняться программированием. Его структура и производительность имеют преимущества как человека, так и машины-манипулятора.
2. Какова конструкция манипулятора?Вообще говоря, манипулятор в основном состоит из следующих частей:
— Ручной или захватный механизм: включая пальцы, механизм передачи силы и т. д. Он в основном играет роль захвата и размещения работы
— Передаточный механизм или рука: включая запястье, руку и т. д. В основном используется для изменения направления и положения объектов.
д. В основном используется для изменения направления и положения объектов.
— Приводная часть: это мощность первых двух частей, поэтому ее также называют источником энергии. Существует четыре наиболее часто используемых типа привода: гидравлический, пневматический, электрический и механический.
— Часть управления: это система команд действия манипулятора. Он контролирует последовательность (программу), положение и время (даже скорость и ускорение) действий.
— Прочие части: например, корпус машины, ходовой механизм, устройство обнаружения хода и сенсорное устройство и т. д.
3. Какие существуют типы роботов-манипуляторов?Манипулятор можно классифицировать по четырем аспектам: область применения, форма координат движения, режим движения и сила руки.
3.1 Классификация по области применения– Манипулятор специальный
Как правило, специальный манипулятор имеет только фиксированную программу без отдельной системы управления. Он подчинен машине или производственной линии, которая используется для автоматической передачи объектов или управления инструментом.
Он подчинен машине или производственной линии, которая используется для автоматической передачи объектов или управления инструментом.
Например, «манипулятор для загрузки и разгрузки листового металла», «автоматический манипулятор для штамповки», «манипулятор для автоматической производственной линии лазерной резки» и т. д.
Манипулятор имеет простую конструкцию и низкую стоимость и подходит для массового производства с простым действие.
– Универсальный манипулятор
Имеется в виду система управления с переменными программами и отдельными приводами. Он не подчиняется какой-либо машине и может автоматически завершать перемещение предметов или управлять некоторыми механическими устройствами.
Общие манипуляторы можно разделить на два типа: простой тип и сервопривод в соответствии с их различными методами позиционирования и управления.
Простой тип — это только точечное управление, поэтому он относится к программному типу управления. Тип сервопривода может быть точечным управлением или управлением непрерывной траекторией, обычно принадлежащим к типу цифрового управления.
– Прямоугольный координатный манипулятор
Рука может двигаться по трем направлениям прямоугольных координатных осей x, y и Z.
То есть, руку можно отводить назад и вперед (чтобы двигаться в направлении X), перемещать влево и вправо (чтобы двигаться в направлении Y) и поднимать вверх и вниз (чтобы двигаться в направлении Z). .
– Цилиндрический координатный манипулятор
Манипулятор может перемещаться по направлениям X и Z прямоугольной оси координат и вращаться вокруг оси Z.
То есть руку можно отводить назад и вперед, поднимать вверх и вниз и вращать влево и вправо.
– Сферический координатный манипулятор
Рука может перемещаться по оси X прямоугольной оси координат и вращаться вокруг осей Y и Z.
То есть, руку можно втягивать назад и вперед (двигаясь в направлении X), качать вверх и вниз (устанавливать на вращение вокруг оси Y) и вращать влево и вправо (все еще настраивать на вращение вокруг оси Z).
– Многошарнирный манипулятор
Рука этого манипулятора может быть разделена на малую руку и большую руку. Соединение цевья со стрелой (локтем) и соединение стрелы с корпусом (плечо) являются шарнирными (шарнирными).
То есть предплечье может качаться вверх и вниз вокруг локтя, предплечье может вращаться под разными углами вокруг плеча, а рука также может вращаться влево и вправо.
3.3 Классификация по режиму движения— Манипулятор с гидравлическим приводом: с приводом от масла под давлением.
— Манипулятор с пневматическим приводом: с приводом от сжатого воздуха.
— Манипулятор с электроприводом: с прямым приводом от электродвигателя.
— Манипулятор с механическим приводом: способ привода, при котором мощность узла передается на манипулятор через кулачки, шатуны, шестерни, механизмы прерывистого действия и т. д.
3.4 Классификация по силе манипулятора— Усилие микроманипулятора менее 1 кг
— Усилие малого манипулятора 1-10 кг
— Усилие среднего манипулятора 10- 30 кг
— Усилие большого манипулятора больше 30 кг
4. Какова функция манипулятора?
Какова функция манипулятора?
Манипулятор — самый ранний промышленный робот и самый ранний современный робот.
Манипулятор может заменить тяжелый человеческий труд для реализации механизации и автоматизации производства. Он может работать во вредных условиях для защиты личной безопасности.
Поэтому он широко используется в машиностроении, металлургии, электронике, легкой промышленности, атомной энергетике и других отраслях.
Роботизированные манипуляторы обычно используются в качестве приспособлений к станкам или другим машинам. Например, загрузка, разгрузка и перемещение заготовок на автоматических станках или автоматических производственных линиях, смена режущих инструментов в обрабатывающих центрах и т. д.
Как правило, независимое устройство управления отсутствует. Некоторыми рабочими устройствами должны управлять непосредственно люди. Например, оператора «ведущий-ведомый», используемого в атомной энергетике для работы с опасными грузами, также часто называют манипулятором.
Некоторыми рабочими устройствами должны управлять непосредственно люди. Например, оператора «ведущий-ведомый», используемого в атомной энергетике для работы с опасными грузами, также часто называют манипулятором.
Применение манипулятора в кузнечном производстве может способствовать дальнейшему развитию производственных мощностей кузнечного оборудования и улучшению горячих, уставших и других условий труда.
Автоматизация роботизированного листогибочного пресса
5. Обзор: разработка манипулятораМанипулятор — новое устройство, разработанное в процессе механизации и автоматизации.
В современном производственном процессе робот-манипулятор широко используется в автоматической производственной линии.
Исследования и производство роботов стали новой технологией, быстро развивающейся в области высоких технологий. Это еще больше способствует развитию манипулятора и позволяет манипулятору лучше реализовать органическое сочетание с механизацией и автоматизацией.
Мы не можем просто рассматривать «робот, заменяющий человека» как решение проблемы занятости, но как воплощение улучшения автоматизации промышленного производства, точности, интеллекта и качества продукции.
Хотя манипулятор не так гибок, как человеческая рука, он обладает характеристиками повторяющейся работы и труда, отсутствия усталости, отсутствия страха перед опасностью, а сила захвата тяжелых предметов больше, чем у человеческих рук. Поэтому манипулятор был оценен многими отделами и широко используется.
6. Каковы преимущества использования манипулятора?Благодаря постоянному совершенствованию современной автоматизации применение манипуляторов становится все более и более широким.
Применение манипулятора:
В машиностроении литье, ковка, сварка, клепка, штамповка, термообработка, механическая обработка, сборка, проверка, напыление, гальваническое покрытие и другие процессы и виды работ имеют примеры применения.
Он также используется в других отраслях, таких как легкая промышленность, строительство, национальная оборонная промышленность, пластмассовая промышленность и так далее.
В отрасли обработки листового металла преимущества использования роботизированного манипулятора резюмируются следующим образом:
— Улучшение автоматизации всего производственного процесса
Использование манипулятора помогает реализовать автоматизацию передачи материала, загрузки заготовки и разгрузка, замена обрабатывающего инструмента и сборка деталей оборудования, чтобы повысить эффективность производства труда и снизить себестоимость продукции.
— Улучшить рабочую среду и избежать потенциальных угроз безопасности
В условиях высокой температуры, высокого давления, низкой температуры, низкого давления, пыли, шума, запаха, радиоактивных веществ или других токсичных загрязнений и узкого рабочего пространства опасно или невозможно взять заготовку непосредственно рукой. Применение манипулятора может частично или полностью заменить людей для безопасного и эффективного выполнения операции.
Применение манипулятора может частично или полностью заменить людей для безопасного и эффективного выполнения операции.
— Сокращение рабочей силы и содействие эффективному производству
Человеческие руки заменены манипуляторами для работы, что является аспектом прямого сокращения рабочей силы. В то же время, поскольку манипулятор может работать непрерывно, это вариант сокращения рабочей силы манипулятора.
В настоящее время манипулятор почти применяется в автоматических станках с ЧПУ и автоматических производственных линиях с интегрированной обработкой, чтобы снизить точность управления рабочей силой и производством и способствовать эффективному производству.
Применение манипуляторов в производстве листового металла и во всей производственной и обрабатывающей промышленности становится все более и более обширным, и его значение становится все более и более важным.
В современной жизни и производстве, с быстрым развитием науки и техники, самая большая разница между рукой робота и рукой человека заключается в гибкости и выносливости.