схема электропроводки, электрооборудования, электрическая, автомобиля, проводки, Евро-3
Перейти к содержанию
Search for:
Автор Petroviches На чтение 3 мин.
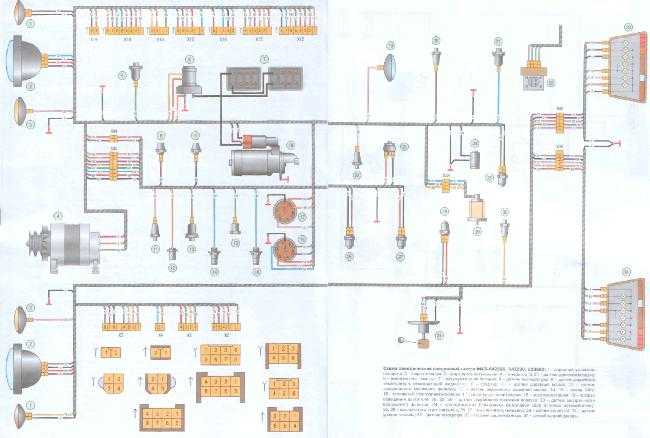
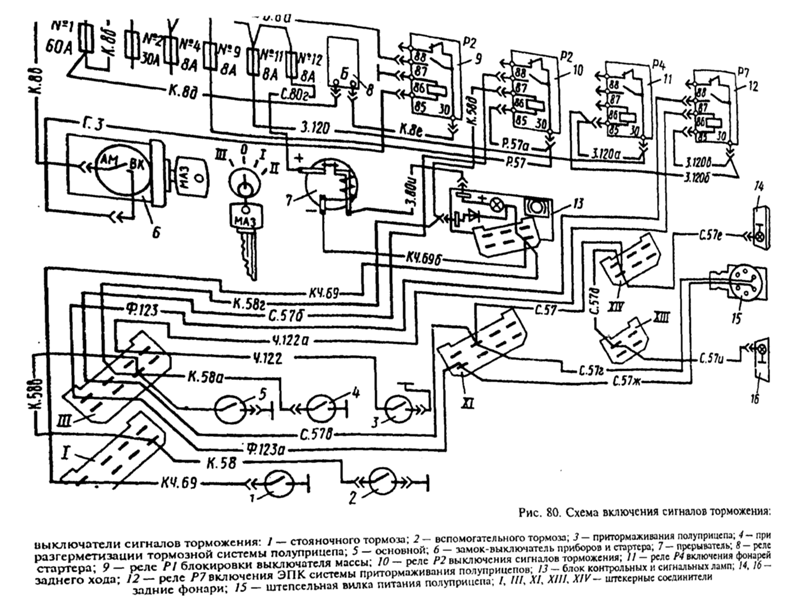
Электросхемы МАЗ — это документ, в котором изображены все составные элементы электрического оборудования автомобиля.
Устройство электрических систем автомобиля МАЗ
Электрическая система включает в себя такие механизмы:
- Система электроснабжения и запуска двигателя. Она состоит из промежуточного реле, выключателя массы батарей, замка-выключателя устройств и стартера.
- Аккумуляторная батарея. Ее номинальное напряжение — 12 В. Здесь установлено 2 батареи, которые соединены последовательно друг с другом.
- Генераторная установка. Это генератор переменного тока, оборудованный выпрямительным блоком.
- Стартер с электросхемой Евро-3. Он состоит из контактного болта, стакана, тяги якоря, реле, обмотки, резьбовых заглушек, электрорешетки.

- Выключатель массы батарей. Он необходим для отключения и подключения аккумулятора к массе транспортного средства.
- Электрофакельное устройство. Его функция заключается в облегчении запуска двигателя в условиях низких температур.
- Предпусковой обогреватель.
- Система освещения и световой сигнализации. В эту схему электрооборудования входят головные фары, прожекторы, противотуманные огни, задние фонари, освещение внутри кабины водителя.
- Контрольно-измерительные приборы. Сюда входят спидометр, двухстрелочный индикатор уровня давления, блок контрольных и сигнальных ламп.
- Звуковая сигнализация. Она предназначена для оповещения о падении уровня давления воздуха в тормозном механизме до критической отметки.

Обслуживание, неисправности и ремонт
Основные неисправности и ремонт электрооборудования:
- Вышли из строя лампы подсветки указательных приборов. В этом случае рекомендуется проверить надежность контакта в разъемных соединениях, осмотреть предохранительное устройство на наличие повреждений и дефектов, проверить целостность реостата подсветки и исправность реле.
- Во время включения передачи заднего хода не загораются фонари. В этом случае следует устранить короткое замыкание в проводке фонаря, проверить надежность контактов, подключить жгут к датчику заднего хода, осмотреть лампу на наличие дефектов, привести в соответствие провода в колодке.
- Не загораются стоп-сигналы задних фонарей. Проблема может быть связана с обрывом цепи, возникновением короткого замыкания, неисправностью сигналов торможения, обрывом нити лампы накаливания.
- Не горят головные фонари. Необходимо осмотреть электропроводку на наличие короткого замыкания, провести внешний осмотр переключателя (при обнаружении повреждений — заменить), проверить исправность реле.
- Не работает обогрев зеркал. Следует осмотреть контакты в разъемных соединениях, проверить предохранитель на износ, заменить поврежденные детали в системе.
- Постоянно горят головные фары. В этом случае нужно проверить исправность переключателя, надежность контактов в колодках, осмотреть реле на наличие дефектов.
- Не горят указатели поворотов. Необходимо заменить лампы, осмотреть прерыватель, заменить БКА.
- Вышел из строя тахометр. Неисправность может быть вызвана сбоями в работе датчика, предохранительного устройства или ненадежностью контактов в колодках.


Техническое обслуживание проводится после 50000 км пробега. Для исправной работы всех механизмов электрического оборудования не рекомендуется отключать провода от плюсового вывода и от аккумулятора, проверять функционирование систем путем замыкания клемм или мегомметром.
Читайте также:
Оцените автора
технические характеристики, схема электрооборудования, кабина, редуктор заднего моста, фото, видео
Начиная с 70х годов предыдущего века Минский автомобильный завод (МАЗ) начал выпускать тягачи, с помощью которых был сделан весомый шаг в развитии грузовой техники.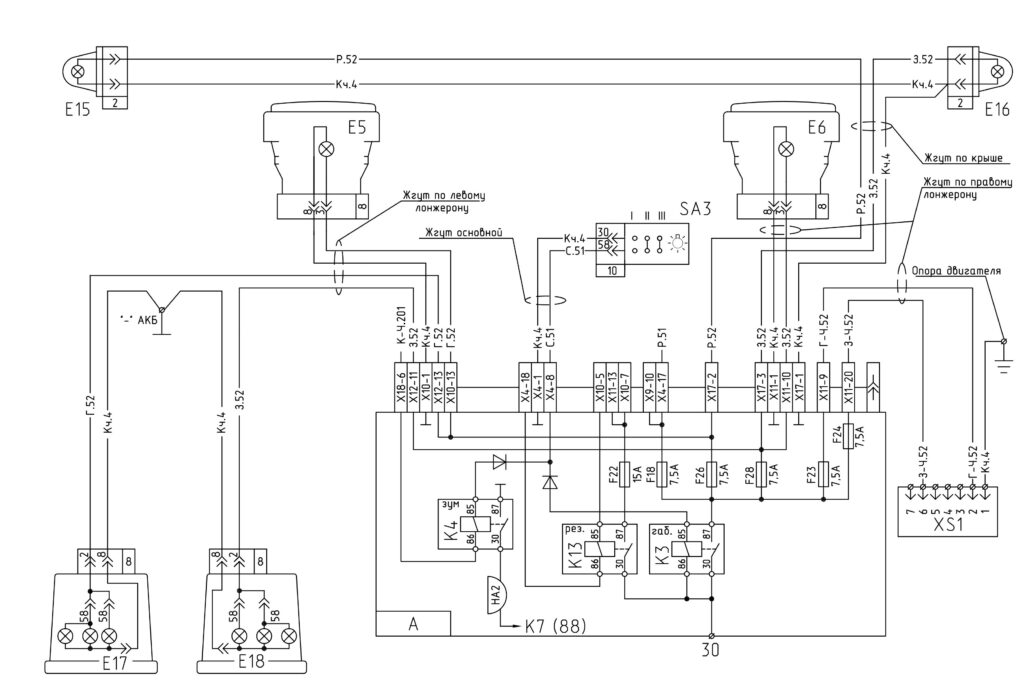 Они стали незаменимыми помощниками для перевозки крупногабаритных и неделимых грузов, буксировки прицепов и полуприцепов. В 1988 году МАЗ 54323, пришедший на смену легендарной модели МАЗ 5432, стал достойной ее заменой.
Они стали незаменимыми помощниками для перевозки крупногабаритных и неделимых грузов, буксировки прицепов и полуприцепов. В 1988 году МАЗ 54323, пришедший на смену легендарной модели МАЗ 5432, стал достойной ее заменой.
Он использовался, чтобы транспортировать груз в составе автопоездов.
КамАЗ 4308: технические характеристики и его описание.
КамАЗ 65116 и его характеристики читайте в статье.
Обзор МАЗа 5551 здесь.
Содержание
Технические характеристики
В данной таблице представлены основные технические характеристики грузовика.
| Модель двигателя | ЯМЗ-238б |
| Мощность двигателя | 300 (л.с.) |
| Коробка передач | ЯМЗ-238а |
| Число передач | 8 |
| Подвеска | Рессорная |
| Размер шин | 11.00R20 (300R508) |
| Топливный бак | 300 |
| Кабина | Двухместная со спальным местом |
| Максимальная скорость автопоезда | 100 км/час |
| Время разгона автопоезда до 60 км/час | 60 с |
| Тормозной путь автопоезда с 60 км/час | 36,7 м |
Масса максимально загруженного автомобиля составляет 16000 кг, из которых 6000 кг приходится на переднюю ось, а 10000 – на заднюю. На седельно-сцепное устройство — 8800 кг. Масса автомобиля со стандартным оборудованием, различными расходными материалами составляет 7050 кг, из которых нагрузка 4680 и 2370 кг на передние и задние оси соответственно. У основного полуприцепа масса равна 26800 кг, а массой максимально загруженного автопоезда является 35600 кг.
На седельно-сцепное устройство — 8800 кг. Масса автомобиля со стандартным оборудованием, различными расходными материалами составляет 7050 кг, из которых нагрузка 4680 и 2370 кг на передние и задние оси соответственно. У основного полуприцепа масса равна 26800 кг, а массой максимально загруженного автопоезда является 35600 кг.
Интерьер
Кабина МАЗа 54323 просторная, рассчитана на водителя и пассажира. Она подрессорена, с возможностью наклона вниз при помощи гидроцилиндра. В ней есть пара спальных мест, что удобно, так как грузовик чаще используется для дальних расстояний.
Сиденье водителя — подрессоренное, регулируемое параметрами: высотой, длиной, наклоном спинки и подушки.
Схема электооборудования
В МАЗа 54323 система электрооборудования 24-вольтовая, которая стандартная во всех моделях и модификациях. Работа всех систем тягача зависит от световых сигнализаторов, но при необходимости контролируется с помощью шумового реле.
[tip]МАЗ 54323 имеет большое количество лампочек, датчиков, контрольных приборов и сигнализаторов для оценки состояния агрегатов автомобиля. [/tip]
[/tip]
КамАЗ самосвал 65115: технические характеристики, цена, отзывы, видео.
Технические характеристики КамАЗа самосвала 53229 тут.
Информацию о модели КамАЗа 4310 читайте в этой статье.
Редуктор
Редуктор заднего моста МАЗа 54323 – механизм, который отвечает за величину крутящего момента автомобиля.
В конструкции данной составляющей находится овальный банджо и фланец на четыре отверстия. Чтобы достичь максимального срока службы некоторых деталей, а также редуктора, нужно использовать оптимальные материалы.
Заключение
Разные мнения водителей можно услышать по поводу машины: кабины, кпп, подвески, рамы, колес и редуктора.
Но абсолютно все считают главным ее плюсом двигатель. Он самый долговечный из всех отечественных. МАЗ – надежный, сильный, не дорогой и выносливый автомобиль, который достоин внимания.
LOT 6 PR 54329, Питсбург, Техас 75686 Продажа | MLS# 14647682
Заинтересованы в Новостройках? Работайте со строителем над этой открытой планировкой с 3 спальнями и 2 ванными комнатами на 1,883 акрах. План этажа включает в себя: потолки высотой 10 футов, красивый настенный электрический камин, открытую кухню с плитой, микроволновой печью и посудомоечной машиной. Главная спальня с гардеробной для него и для нее, кафельным душем и двойным туалетным столиком. Как раз вовремя, чтобы выбрать цвет стены, шкафа и гранита!
План этажа включает в себя: потолки высотой 10 футов, красивый настенный электрический камин, открытую кухню с плитой, микроволновой печью и посудомоечной машиной. Главная спальня с гардеробной для него и для нее, кафельным душем и двойным туалетным столиком. Как раз вовремя, чтобы выбрать цвет стены, шкафа и гранита!
Подробности
год построенный
2021
Парковка
2
Цена / кв. Acres
1.883
Бытовая техника
Посудомоечная машина, электрическая плита, микроволновая печь
Ванные полные
2
Ванные комнаты Всего
2
Всего спален
3
Пол
Ковер, керамическая плитка
Жилая площадь
1865 кв. футов.
Членский взнос
250
Периодичность членских взносов
Ежегодно
Подтип собственности
Резиденция на одну семью
Тип недвижимости
Жилая
Год постройки
2021
Гаражные места
2
Размер участка в акрах
1,883
Размер партии, квадратные футы
82023,48
Единицы размера участка
акров
Парковка Всего
2
Охлаждение
Система кондиционирования, электрическая
Отопление
Центральное, электрическое
Город
Питтсбург
Округ или приход
Лагерь
Начальная школа
Питсбург
Средняя школа
Питтсбург
Округ средней школы
Питтсбург Исд.
Средняя или младшая школа
Питтсбург
Название подразделения
Foothill Estates
Компенсация агентства покупателя *
2,5%
* Предложение компенсации листинговым брокером делается только участникам MLS, где листинг подан.
Цена за квадратный метр и сутки на сайте не указаны и рассчитываются компанией RE/MAX.
Листинговое бюро Маяк Риэлти, 903-573-2324
МЛС# 14647682
Обновлено 2:41 — 30.10.2022
Листинговый агент Сьюзи Кармона
Broker Reciprocity — это текущая подборка активных списков всех подписчиков Broker Reciprocity, за исключением тех списков, в которых продавец или агентство продавца отказались от публикации в Интернете, указав это в договоре о листинге или отправив письменное уведомление в Службу множественных списков. Списки Информационной службы по недвижимости Северного Техаса отмечены логотипом «NTREIS». Предоставленная информация считается надежной, но ее точность не гарантируется; вам рекомендуется проверить факты, которые важны для вас. Никакие гарантии, явные или подразумеваемые, не предоставляются в отношении данных, содержащихся в настоящем документе, а также в отношении их использования или интерпретации пользователем. Информация считается надежной, но не гарантированной. Предоставляемая информация предназначена для личного, некоммерческого использования потребителями и не может быть использована ни для каких целей, кроме как для определения потенциальных свойств, которые потребители могут заинтересовать в покупке. Copyright© 2022 Информационная служба недвижимости Северного Техаса. Все права защищены.
Списки Информационной службы по недвижимости Северного Техаса отмечены логотипом «NTREIS». Предоставленная информация считается надежной, но ее точность не гарантируется; вам рекомендуется проверить факты, которые важны для вас. Никакие гарантии, явные или подразумеваемые, не предоставляются в отношении данных, содержащихся в настоящем документе, а также в отношении их использования или интерпретации пользователем. Информация считается надежной, но не гарантированной. Предоставляемая информация предназначена для личного, некоммерческого использования потребителями и не может быть использована ни для каких целей, кроме как для определения потенциальных свойств, которые потребители могут заинтересовать в покупке. Copyright© 2022 Информационная служба недвижимости Северного Техаса. Все права защищены.
Информация о районе
Представлено
Взлом Meccano M.
 A.X. | Hackaday.io
A.X. | Hackaday.ioMeccano M.A.X. представляет собой игрушечного робота высотой 30 см, который весело собирать. Хотя существуют мобильные приложения, которые позволяют удаленно управлять роботом и предоставляют элементарные возможности программирования с помощью перетаскивания, нет доступных библиотек Arduino с открытым исходным кодом, позволяющих преобразовать игрушечного робота в роботизированную платформу. Основная цель этого проекта — изменить это и предоставить библиотеку Arduino для управления MAX и превратить его в робота машинного зрения,
Детали
Это амбициозный проект, состоящий из 3 этапов:
- Этап 1 — Создание библиотеки Arduino для управления MAX — это включает реверс-инжиниринг протокола Meccano для связи с интеллектуальными компонентами MAX, например, перемещением, сервоприводами, мимикой и т. д.
- Этап 2. Используйте HiCAT Livera для преобразования MAX в робота на основе компьютерного зрения. HiCAT Livera — это недорогая платформа машинного зрения для робототехники. Он состоит из камеры, встроенной платформы Linux с WIFI и микроконтроллера, совместимого с Arduino Leonardo, в небольшом корпусе. Именно последнее позволяет использовать библиотеку Arduino, разработанную на этапе 1, для низкоуровневого управления MAX.
- Этап 3. Управление MAX из облака. Вместо управления MAX с помощью встроенного Linux HiCAT Livera видео будет передаваться в контейнер, на котором запущена среда машинного зрения/глубокого обучения в облаке.
 HiCAT Livera — это недорогая платформа машинного зрения для робототехники. Он состоит из камеры, встроенной платформы Linux с WIFI и микроконтроллера, совместимого с Arduino Leonardo, в небольшом корпусе. Именно последнее позволяет использовать библиотеку Arduino, разработанную на этапе 1, для низкоуровневого управления MAX.
HiCAT Livera — это недорогая платформа машинного зрения для робототехники. Он состоит из камеры, встроенной платформы Linux с WIFI и микроконтроллера, совместимого с Arduino Leonardo, в небольшом корпусе. Именно последнее позволяет использовать библиотеку Arduino, разработанную на этапе 1, для низкоуровневого управления MAX.MaxLivera.inoArduino Sketch для взаимодействия с веб-приложением, работающим на плате Hicat Livera. —
9,39 КБ —
08. | Скачать | |
MaxClassDiagram.pngДиаграмма классов UML для библиотеки MeccaChannel Arduino Портативная сетевая графика (PNG) — 156,40 КБ — 25.08.2018 в 04:32 | Предварительный просмотр | Скачать |
 10.2018 в 22:16
10.2018 в 22:16- 1
×
Meccano M. A.X. Робот
Meccano M.A.X. представляет собой игрушечного робота высотой 30 см, который встраивается в роботизированную платформу.
- 1 × HiCAT Ливера Платформа машинного зрения с открытым исходным кодом с захватом видео/фото 720P, WIFI, совместимостью с Arduino Leonardo и встроенным Linux.
- 1 × Ливера Мотор Драйвер Он обеспечивает питание, доступ к контактам ввода/вывода на совместимом с Arduino Leonardo, а также к 4 драйверам двигателей.
 A.X. Робот
Meccano M.A.X. представляет собой игрушечного робота высотой 30 см, который встраивается в роботизированную платформу.
A.X. Робот
Meccano M.A.X. представляет собой игрушечного робота высотой 30 см, который встраивается в роботизированную платформу.Необычная демонстрация MQTT, Kafka и Fuse Online IoT с участием Макса
Мистер ДримБот • 28.11.2018 в 23:12 • 0 комментариевНедавно IBM купила Red Hat за 33 миллиарда долларов в основном за свою платформу контейнеров Openshift.
Я создал эту демонстрацию, используя AMQ, Kafka, Fuse Online, работающую на Openshift. Движение Макса отправляется с помощью MQTT и сохраняется в теме Kafka, а затем берется из темы Kafka и сохраняется в файле на FTP-сайте с помощью интеграции Fuse Online. Затем файл используется в качестве источника для воспроизведения движений на Max с помощью небольшой программы на Java.
Наслаждайтесь 😉Приносим свои извинения за обрезанное видео
Мистер ДримБот • 09.10.2018 в 11:16 • 0 комментариевПо неизвестным причинам видео обрезано. Я удалил обрезанное видео и загрузил полную версию.
Управление MAX с помощью веб-приложения
Мистер ДримБот • 08.10.2018 в 22:33 • 0 комментариевВот видео, показывающее, как MAX управляется веб-приложением, работающим на плате камеры Hicat Livera:
Да, наконец-то я получил вторую плату Hicat Livera взамен испорченной. Я собрал Livera с платой драйвера двигателя (используется для обеспечения питания 3A 5V) и устройством поворота и наклона (на самом деле только плитка) и использовал сборку для замены контроллера MAX (расположенного в его средней части).
Перед их сборкой я добавил 3 разъема к неиспользуемым контактам Arduino для управления Locomotion, сервоприводом и лицом Meccano MAX. Контакты SCK, 12 и MISO соответственно. См. фото ниже.Я изменил эскиз Arduino робота Hicat, чтобы использовать мою библиотеку Arduino для Meccano MAX, чтобы веб-приложение Hicat можно было использовать для управления MAX с помощью браузера. Графический интерфейс показан ниже.
Вы можете видеть, что видео в реальном времени отображается вверху, а все элементы управления роботом находятся под ним.
В опубликованном видео показано использование веб-приложения Hicat для управления MAX, включая включение лазера, установленного на блоке наклона, движение вперед и назад, повороты при отображении изображения, снятого камерой. К сожалению, окно, показывающее видео, слишком велико, чтобы увидеть весь живой экран без прокрутки вверх и вниз.
Веб-приложение работает на встроенной Linux плате Hicat Livera Camera. Он связывается со встроенным Arduino Leonardo, совместимым с использованием UART Arduino (последовательный).
Нажатие на виджеты управления веб-приложения отправляет команду на Arduino, которая выполняет операции.Скетч Arduino «MaxLivera.ino» можно найти в репозитории на этой странице.
Следующим шагом будет преобразование MAX в робота, основанного на зрении, что означает, что он реагирует на окружающую среду, наблюдая за изменением пейзажа через изображение, подаваемое камерой.
Быстрое обновление статуса: поддержка HiCat Livera отсутствует!
Мистер ДримБот • 02.10.2018 в 21:15 • 0 комментариевНа форуме Hicat Livera был размещен вопрос о том, как разблокировать Livera 78 дней назад, но до сих пор нет ответа. Я заметил, что последняя активность на форуме была еще в мае, нехороший знак.
Затем я заметил в видео Hicat на Youtube: руководство по сборке Livera Robot Kit, другой человек задавал тот же вопрос, что и я 4 месяца назад: «…изменил WiFi для подключения к моему маршрутизатору, теперь я не могу подключиться к нему, и сброс последовательность не работает Есть предложения по исправлению?…». И не было никакой реакции!
Я получаю еще одну Livera, чтобы завершить, по крайней мере, эту фазу. Я также рассматриваю идею использования другой платформы для проекта, поскольку похоже, что Livera «ушла на пенсию» и у нее нет поддержки. Нет смысла двигаться вперед с этой платформой.Оставайтесь с нами!
Боже мой, я замуровал свою Hicat Livera!
Мистер ДримБот • 23.09.2018 в 23:48 • 0 комментариевНаконец-то я вернулся из рабочего отпуска и вернулся к проекту.
Перед тем, как отправиться в отпуск, я столкнулся с явной проблемой, связанной с питанием, когда лазер не включался до тех пор, пока USB-кабель не был подключен к Hicat Livera. В спецификациях платы Hicat Motor Driver указано, что она может принимать входное напряжение 5-12 В. Я использовал вход 5V, когда столкнулся с проблемой. Я переключился на использование 12 В, и проблема исчезла.Мне не терпелось узнать, позволит ли наличие достаточной мощности сейчас также использовать режим Wifi AD (способ подключения Hicat к домашнему беспроводному маршрутизатору), который я никогда не заставлял работать раньше. Я использовал веб-приложение, чтобы переключиться в режим AD. Это не сработало, но, согласно моему домашнему маршрутизатору, он получил от него IP-адрес. Я не мог использовать веб-приложение или telnet для доступа к нему через новый IP-адрес. Когда я сталкивался с этой проблемой ранее, я мог положиться на переключатель RST-PCB сброса Wi-Fi, чтобы вернуть его в режим AP. На этот раз я не смог, потому что в процессе загрузки возникли проблемы (горит красный индикатор).
Я выключал и включал много раз, но так и не смог восстановиться. Фактически, неудачное переключение в режим AD замуровало Hicat Livera. Пока что разлочить не удалось. Я попробую еще раз. В худшем случае мне придется приобрести вторую установку Hicat Livera, чтобы продолжить работу над проектом.Если вы сталкивались с этой проблемой Hicat раньше и смогли ее решить, сообщите мне, как это сделать.
Фаза 2: Интерлюдия
Мистер ДримБот • 06.09.2018 в 02:41 • 0 комментариевУехать на 10 дней по работе/отпуску: посетить конференцию за границей и взять несколько выходных. В это время вы не услышите обо мне. Просто хочу, чтобы вы знали, что я не отказываюсь от проекта, просто беру отпуск из-за рабочих обязательств.
Вчера провел небольшое тестирование, загрузив эскиз робота HiCAT для проверки лазера. Было странно, когда я подключался к Leonardo JiCAT с помощью USB-кабеля, лазер работал. При отсоединении не работал. Да, основной источник питания был все время подключен. Похоже, это указывает на проблемы с питанием. Однако, судя по спецификациям, понижающий преобразователь TPS54329 имеет максимальный выходной ток 3 А!
Нужно продолжить расследование, когда я вернусь.
Фаза 2 – Первое знакомство с HiCAT Livera
Мистер ДримБот • 03.09.2018 в 05:39 • 1 КомментарийВы можете узнать больше о HiCAT Livera здесь. я Наконец, у меня есть все компоненты, которые мне нужны для начала Фазы 2.
Livera и Motor Driver показаны ниже:Цель этот этап заключается в преобразовании Meccano MAX в робота с визуальным зрением. с помощью HiCAT Livera и прилагаемого к нему драйвера двигателя. Хотя Meccano MAX уже имеет моторы для передвижения, Motor Driver — это удобная плата, обеспечивающая понижение напряжения, серворазъемы (который я собираюсь использовать для цифрового вывода для управления тремя цепями Устройства MAX: моторы, сервоприводы и Face. Я также собираюсь использовать Моторная способность Motor Driver для питания лазера для эффектов.
Первым делом. я нужно 2 силовых кабеля для подключения к Meccano Max: один для подключения к батарея другая другая к интеллектуальному источнику питания, который также измеряет потребляемый ток. Мне также нужны 3 сервокабеля для подключения Устройства Meccano Max к разъемам сервопривода Motor Driver. Эти кабели показаны на следующем фото.
Следующее фото показывает связь между Livera/Motor Driver с питанием источник и Meccano Max.
При первом включении вверх, Livera появляется в том, что HiCAT называет режимом AP, который в основном точка доступа 192.168.1.1. Затем я указал свой браузер на Веб-приложение Livera: http://192.168.1.1/mmc/webapp/index.html, переключился на режим MJPEG и выбрал LiveView. Вы можете увидеть меня на экран компьютера. Это все успехи, которых я достиг на данный момент. я имел не удалось попробовать другие функции веб-приложения:
Изменение Режим WIFI to AD (термин HiCAT для подключения Livera к вашему собственному маршрутизатору). режим AD) — я так и сделал. Он получает IP-адрес от моего маршрутизатора (видимый на маршрутизаторе), но веб-приложение больше не отвечает ни на один запрос: веб-приложение или телнет больше. Сброс в режим AP работает, но я все еще не могу подключите его к моему маршрутизатору и получите доступ к нему с моего ПК, подключенного к та же сеть.
Переход на Режим робота — ничего не происходит. Да, я заменил Arduino эскиз для робота HiCAT с моим эскизом для Meccano Max.
я
даже добавил Лазер. Неудачно. Я попробую скетч HiCAT позже, чтобы
посмотрим, смогу ли я, по крайней мере, заставить работать лазер. Если получится, значит
что проблема с моим скетчем иначе это проблема Ливеры.
Это насколько я получите быстрый тест-драйв Livera/Motor Driver. Мне нужно больше времени уделять RTFM.
Завершение этапа 1
Мистер ДримБот • 25.08.2018 в 04:49 • 0 комментариевЯ опубликовал свою библиотеку MeccaChannel Arduino на Github и включил диаграмму классов UML, чтобы упростить ее понимание. Есть несколько неподдерживаемых функций:
- Обучение программированию интеллектуальных движений (L.I.M.), которое позволяет создавать и записывать анимацию путем физического перемещения робота
- Инфракрасный датчик расстояния Meccano M. A.X. (класс предоставлен, но еще не работает)
Хотя поддержка Meccano МАКСИМУМ. устройства неполные. Их достаточно, чтобы перейти к следующему этапу, так как я буду использовать компьютерное зрение вместо ИК-датчика для навигации на этапе 2. Но это не значит, что я не собираюсь добавлять недостающие функции позже.
Если вы читаете исходный код, то должны заметить, что я использую шаблон проектирования цепочки ответственности GOF для слабой связи MeccaChannel с M.A.X. устройства. MeccaChannel реализует протокол Meccano Smart с расширением для M.A.X. моторы и лицо. Для каждого канала MeccaChannel потребуется цифровой контакт Arduino, и он поддерживает до 4 устройств.
На M.A.X. 4 канала используются для:
- Канал 0: левый и правый моторы для передвижения
- Канал 1: Сервоприводы для движений головы и когтей
- Канал 2: Лицо
- Канал 3: ИК-датчик расстояния
На этапе до я собираюсь использовать камеру HiCAT Livera и драйвер двигателя (в основном для подачи питания и простого подключения к каналам вместо использования 4 встроенных водители двигателей).
Библиотека Arduino будет работать на базе Arduino Leonardo, совместимой с HiCAT Livera, а камера будет управляться встроенным Linux Livera. Livera также имеет встроенный WIFI и веб-сервер. Следите за моим следующим обновлением.Цели и компоненты
Мистер ДримБот • 20.08.2018 в 09:22 • 0 комментариевЭто амбициозный проект в 3 этапа:
Создать Библиотека Arduino для управления MAX — это включает реверс разработка протокола Meccano для связи с MAX smart компоненты, например, передвижение, сервоприводы, выражение лица и т. д.
Использовать HiCAT Livera превратит MAX в робота на основе компьютерного зрения — HiCAT Livera — недорогая платформа машинного зрения для робототехники.
Это
состоит из камеры, встроенной платформы Linux и платы Arduino.
Леонардо-совместимый микроконтроллер в маленьком корпусе. Это
последний, который позволяет использовать библиотеку Arduino, разработанную в
Фаза 1 для управления низким уровнем MAX.Контроль МАКС. из облака — вместо управления MAX с помощью HiCAT Livera встроенный Linux, видео для потоковой передачи на машину с контейнером структура видения/глубокого обучения в облаке.
Компоненты
Компоненты, используемые на каждом этапе, перечислены ниже:
Фаза 1:
Фаза 2:
Фаза 3:
Хотя конструктор сайт предоставляет документ Smart Module Protocols, Arduino библиотека и пример проекта, все они устарели и пригодны для использования только версии роботов Meccano Meccanoid. Чтобы использовать MAX компоненты, такие как двигатели, лицевой светодиодный экран и т. д., расширенный протокол должен быть реконструирован. Я начал свое сотрудничество с «bmd1103» на Arduino Форум некоторое время назад на эту тему.
 Я создал эту демонстрацию, используя AMQ, Kafka, Fuse Online, работающую на Openshift. Движение Макса отправляется с помощью MQTT и сохраняется в теме Kafka, а затем берется из темы Kafka и сохраняется в файле на FTP-сайте с помощью интеграции Fuse Online. Затем файл используется в качестве источника для воспроизведения движений на Max с помощью небольшой программы на Java.
Я создал эту демонстрацию, используя AMQ, Kafka, Fuse Online, работающую на Openshift. Движение Макса отправляется с помощью MQTT и сохраняется в теме Kafka, а затем берется из темы Kafka и сохраняется в файле на FTP-сайте с помощью интеграции Fuse Online. Затем файл используется в качестве источника для воспроизведения движений на Max с помощью небольшой программы на Java. 
 Перед их сборкой я добавил 3 разъема к неиспользуемым контактам Arduino для управления Locomotion, сервоприводом и лицом Meccano MAX. Контакты SCK, 12 и MISO соответственно. См. фото ниже.
Перед их сборкой я добавил 3 разъема к неиспользуемым контактам Arduino для управления Locomotion, сервоприводом и лицом Meccano MAX. Контакты SCK, 12 и MISO соответственно. См. фото ниже. Нажатие на виджеты управления веб-приложения отправляет команду на Arduino, которая выполняет операции.
Нажатие на виджеты управления веб-приложения отправляет команду на Arduino, которая выполняет операции.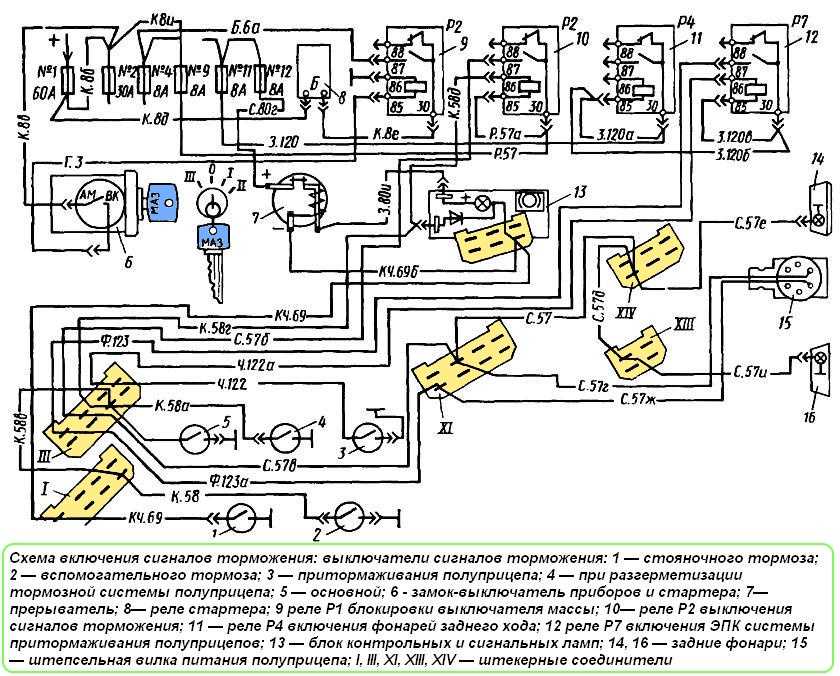 Затем я заметил в видео Hicat на Youtube: руководство по сборке Livera Robot Kit, другой человек задавал тот же вопрос, что и я 4 месяца назад: «…изменил WiFi для подключения к моему маршрутизатору, теперь я не могу подключиться к нему, и сброс последовательность не работает Есть предложения по исправлению?…». И не было никакой реакции!
Затем я заметил в видео Hicat на Youtube: руководство по сборке Livera Robot Kit, другой человек задавал тот же вопрос, что и я 4 месяца назад: «…изменил WiFi для подключения к моему маршрутизатору, теперь я не могу подключиться к нему, и сброс последовательность не работает Есть предложения по исправлению?…». И не было никакой реакции! Перед тем, как отправиться в отпуск, я столкнулся с явной проблемой, связанной с питанием, когда лазер не включался до тех пор, пока USB-кабель не был подключен к Hicat Livera. В спецификациях платы Hicat Motor Driver указано, что она может принимать входное напряжение 5-12 В. Я использовал вход 5V, когда столкнулся с проблемой. Я переключился на использование 12 В, и проблема исчезла.
Перед тем, как отправиться в отпуск, я столкнулся с явной проблемой, связанной с питанием, когда лазер не включался до тех пор, пока USB-кабель не был подключен к Hicat Livera. В спецификациях платы Hicat Motor Driver указано, что она может принимать входное напряжение 5-12 В. Я использовал вход 5V, когда столкнулся с проблемой. Я переключился на использование 12 В, и проблема исчезла. Я выключал и включал много раз, но так и не смог восстановиться. Фактически, неудачное переключение в режим AD замуровало Hicat Livera. Пока что разлочить не удалось. Я попробую еще раз. В худшем случае мне придется приобрести вторую установку Hicat Livera, чтобы продолжить работу над проектом.
Я выключал и включал много раз, но так и не смог восстановиться. Фактически, неудачное переключение в режим AD замуровало Hicat Livera. Пока что разлочить не удалось. Я попробую еще раз. В худшем случае мне придется приобрести вторую установку Hicat Livera, чтобы продолжить работу над проектом.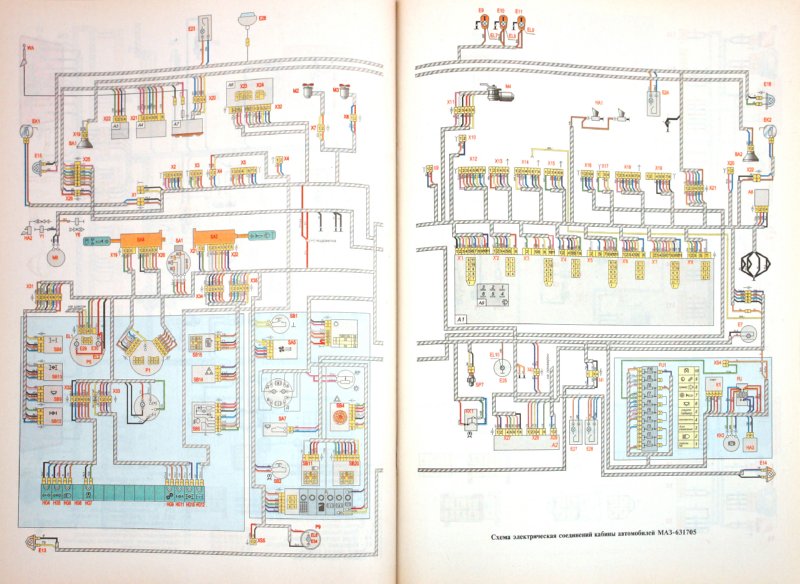
 Livera и Motor Driver показаны ниже:
Livera и Motor Driver показаны ниже:
 я
даже добавил Лазер. Неудачно. Я попробую скетч HiCAT позже, чтобы
посмотрим, смогу ли я, по крайней мере, заставить работать лазер. Если получится, значит
что проблема с моим скетчем иначе это проблема Ливеры.
я
даже добавил Лазер. Неудачно. Я попробую скетч HiCAT позже, чтобы
посмотрим, смогу ли я, по крайней мере, заставить работать лазер. Если получится, значит
что проблема с моим скетчем иначе это проблема Ливеры. A.X. (класс предоставлен, но еще не работает)
A.X. (класс предоставлен, но еще не работает)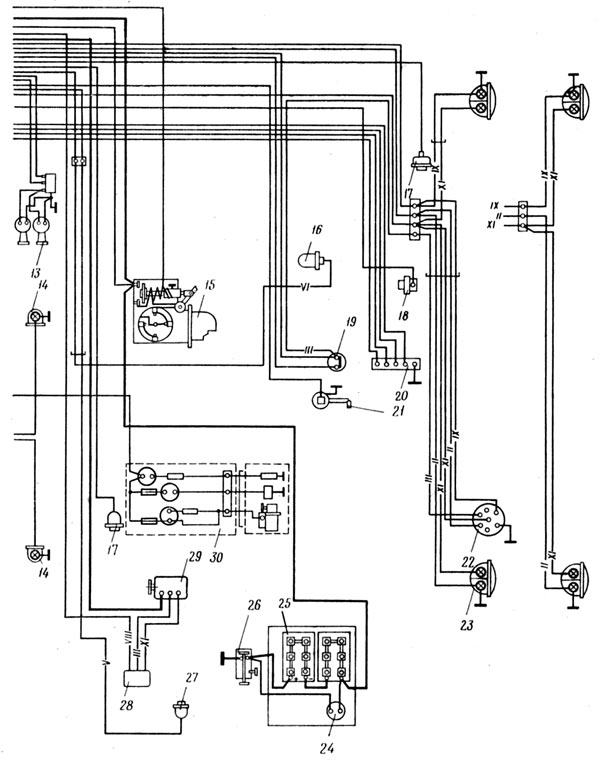 Библиотека Arduino будет работать на базе Arduino Leonardo, совместимой с HiCAT Livera, а камера будет управляться встроенным Linux Livera. Livera также имеет встроенный WIFI и веб-сервер. Следите за моим следующим обновлением.
Библиотека Arduino будет работать на базе Arduino Leonardo, совместимой с HiCAT Livera, а камера будет управляться встроенным Linux Livera. Livera также имеет встроенный WIFI и веб-сервер. Следите за моим следующим обновлением. Это
состоит из камеры, встроенной платформы Linux и платы Arduino.
Леонардо-совместимый микроконтроллер в маленьком корпусе. Это
последний, который позволяет использовать библиотеку Arduino, разработанную в
Фаза 1 для управления низким уровнем MAX.
Это
состоит из камеры, встроенной платформы Linux и платы Arduino.
Леонардо-совместимый микроконтроллер в маленьком корпусе. Это
последний, который позволяет использовать библиотеку Arduino, разработанную в
Фаза 1 для управления низким уровнем MAX.